

|
|
|
Разделы
Публикации
Популярные
Новые
|
Главная » Квазистационарное поведение динамических моделей 1 ... 20 21 22 23 24 25 26 ... 36
О 0,5 Z Рис. 5.30. Составляющая Xi (2) периодической траектории задачи 8, N = 2, в точке бифуркации типа -1 . Параметры взяты из табл. 5.25. Первая точка из этой таблицы выбрана в качестве начальной точки траектории. Нумерация тех точек, где X\{z)= 2, используется в табл. 5.26. тем, что в окрестности выбранных значений параметров существует много точек бифуркации (более подробные результаты можно найти в работе [5.26]). Таблица 5.25. Точки бифуркации удвоения периода для задачи 8 (рис. 5.27а): Л = 2, В = 5,9, р = DJDi = 0,1, = 1, Tift = 2.
Можно разработать аналогичные методы для нахождения точек бифуркации -f 1 и бифуркации рождения тора. Так, в случае бифуркации -+-1 (в автономной системе дифференци- В табл. 5.27 показан ход итераций по схеме Ньютона в случае метода 1. Метод сходится к первой точке из табл. 5.25, а более точно - к четвертому решению из табл. 5.26. При проведении расчетов оказалось, что области начальных приближений, для которых метод Ньютона сходился к выбранным точкам бифуркации -1 , относительно невелики. Это объясняется Таблица 5.26. Четыре различных решения, соответствующие первой точке в табл. 5.25 (см. рис. 5.30): Т = 11,59421, а = 1,22382
Таблица 5.27. Вычисление точки бифуркации удвоения периода для задачи 8. Пример итераций в случае метода 1: А - 2, В = 5,9, р = Z)i/£)2 = 0,1, k = I, r\k = 2. Начальное приближение для метода Ньютона выбиралось случайным образом.
альных уравнений) характеристическое уравнение (5.8.28) имеет двукратный корень +1. т. е. должно выполняться соотношение Pn+i(r\i.....Ла+ь л а) = -(1) = 0 (5.8.32) (условие Р(1) = 0 выполняется автоматически). Уравнения (5.8.19) и (5.8.32) вновь представляют собой систему n+l нелинейных (алгебраических) уравнений относительно п~\- 1 неизвестных 111, ..., r\k-i, Цк+и ..,г\п,Т, а (переменную щ мы опять считаем фиксированной). Далее действуем точно так же, как в методе 1 для точек бифуркации типа -Ь. В случае бифуркации типа тора указанный подход несколько усложняется. Эта бифуркация (см. гл. 2) характеризуется наличием пары комплексно сопряженных собственных чисел Яг, з матрицы монодромии, которые переходят через единичную окружность и для которых в точке бифуркации выполняются соотношения 1Чз1=1. КТ.зФ1, m=I, 2. 3, 4. (5.8.33) Будем искать периодические решения, у которых два мультипликатора имеют вид Оба последующих метода основаны на использовании подходящего разложения характеристического многочлена. Метод 3 (бифуркация типа тора) Выделив из Р {К) множитель - (о^+ 1, напишем Р (К) = {к - (оЯ + 1) + fti- + ... + 6 2) + CK + D. (5.8.34) Здесь (о = 2а и Х^ - ак-\-\={к - Х2){Х - Хз). Коэффициенты bi, b -2. С, D находятся с помощью рекуррентных формул (6о= 1,6-1=0): 6 = + со6 , - 6 2, m = 1, 2, ..., п - 2, (5.8.35) С = а„ 1 + (о6 2 - 6 з, Z) = а„ - (5.8.36) При этом в точке бифуркации типа тора имеют место соотношения ...,Щ-и Щ+и а, (о) = С = 0, (5.8.37а) +2К.....Лй-1. Пк+и ..., Л , а, сй) = О = 0. (5.8.37Ь) Уравнения (5.8.19) и (5.8.37) представляют собой систему п+2 нелинейных (алгебраических) уравнений относительно п + 2 неизвестных Til, ..., Цк-х, Цк+и Цп, Т, а, (О (неизвестная снова считается фиксированной). Метод 4 (бифуркация типа тора) При разложении характеристического многочлена Р{Х) можно использовать то обстоятельство, что (в автономном случае) всегда есть корень i = 1. Разложение при этом принимает вид Р(Я) = (ЯЗ-(2а+ 1)Л,2 + (2а+ 1)Х-1)Х X {X~ + ЬХ~ + ... + 6 -з) + сх + DX + E. (5.8.38) (5.8.39) Коэффициенты 6ь Ьп-з, С, D, Е вновь подсчитываются по рекуррентным формулам {Ьо=1, b-i = Q, 6 2 = 0; (о = 2а) ftm = am + (a+ 1)(&т-1 -т-2) + т-3. =1, 2, . . ., П - 3, с = а„ 2 + b s + (со + 1) {Ьгг-3 - Ьп-), D = а„ , + 6 4 - (со + 1) 6 з, £ = а„ + & -з. Если коэффициенты С и О в соотношениях (5.8.37) вычислить по формулам (5.8.39), то уравнения (5.8.19) и (5.8.37) будут представлять собой систему -(-2 нелинейных уравнений относительно п--2 неизвестных, как и в методе 3 (в найденной точке бифуркации типа тора условие £ = О выполняется автоматически). Вместо соотношений (5.8.37) мы могли бы взять условия С = £ = 0 или £) = £ = О (поскольку Р(1) = 0, то С + + О + £ = О, см. (5.8.38)). Для решения получаемых систем нелинейных уравнений можно вновь воспользоваться методом Ньютона. Можно поступить и так: с помощью метода Гаусса - Ньютона решить систему п + З уравнений (5.8.19), (5.8.37) и £ = О относительно и + 2 неизвестных. В табл. 5.28 приведены точки бифуркации типа тора для задачи 8, найденные описанными выше методами. Отметим, что метод Ньютона является очень чувствительным к выбору начального приближения. При этом подходящее начальное приближение находится обычно с помощью продолжения соответствующей ветви периодических решений. В табл. 5.29 указана одна точка бифуркации типа тора из табл. 5.28 в четырех различных представлениях. Эти различные представления отвечают наличию на траектории периодического решения нескольких точек, в которых Xk(z) принимает заданное значение. Для точки бифуркации при В - 5,5 из табл. 5.28 график функции Xi{z) пересекает прямую tii==2 четыре раза. В табл. 5.29 приведены только значения координат TI2, Лз и (значения Т и а, конечно, одинаковы для всех представлений). Таблица 5.28. Точки бифуркации типа тора для задачи 8 (А = 2, р = D,/D2 = 0,1, k= \,щ = 2).
На рис. 5.31 представлена бифуркационная диаграмма для точек бифуркации типа тора в плоскости параметров В - Z)i. Точки, в которых Х^=1 или V=l, обозначены как 37 и 47
0.05 o<.= D, Рис. 5.31. Бифуркационная диаграмма периодических решений. Бифуркация типа тора. Задача 8, А = 2, р = О^/Оз = 0,1. соответственно. Изображенная на рисунке кривая заканчивается в обозначенных кружком точках, для которых 1=,2 = = 3 = 1. В заключение данного пункта отметим, что описанные выше методы можно без затруднений использовать для вычисления точек бифуркации и в случае неавтономных систем обыкновенных дифференциальных уравнений (см. § 5.11). Кроме того, на основе результатов п. 5.4.2 в точке бифуркации типа -1 можно определить направление ветви решений с двойным периодом. Таблица 5.29. Точка бифуркации типа тора в четырех представлениях; задача 8 (Л = 2, В = 5,5, р = Dj/Da = 0,1, = 1, r\k = 2); Г = 8,32408, а = Di == 0,052495, со = -1,08277. 5.8.6. Метод многократнай стрельбы Метод стрельбы, называемый также иногда методом простой стрельбы (см. п. 5.8.2), в случае сильно неустойчивых периодических решений практически ие работает. В таких случаях можно использовать коиечио-разностный метод, который, однако, не дает нам информации об устойчивости найденного периодического решения; кроме того, размерность решаемых задач оказывается достаточно высокой. Определенным компромиссом между методом стрельбы и разностным методом является метод многократной стрельбы. Он позволяет ие только находить сильно неустойчивые периодические решения, но и достаточно просто получать информацию об их устойчивости. Приступая к описанию метода, разобьем интервал [О, 1] иа т - 1 подынтервалов с помощью точек zy: О = Zi < z, < ... < z i < z = 1, AZj = Zj+i - Zj, /=1, 2, m-1. В точках Zj, j = 1,2, m - 1, выберем начальные условия вида х(2/) = 11/==(Лл. V). (5.8.40) Кроме того, зададимся определенным значением периода Т. Интегрируя уравнения (5.8.4) иа интервалах [zy, z/+i] с начальными условиями (5.8.40), можно найти решение в точке z/+i; обозначим его как x(z/+i 7 , а). Для того чтобы решение в точке Z/+1 было непрерывным, потребуем выполнения условий Fjx{Zj+i\nj, Т, а)-rij+i = 0, /=1,2.....m-1. (5.8.41) Кроме того, из условий периодичности (5.8.5) следует, что г\\ = г\т. Уравнения (5.8.41) представляют собой систему п{т-1) нелинейных (алгебраических) уравнений относительно п{т - \)+1 неизвестных {r\i, г\2, Цт-и Т). Так же, как в случае простой стрельбы, одну составляющую вектора r\i, а именно tiis, зафиксируем. Обозначим tj, = (Ti j, tii, Ц1,к+1, Цхп). Тогда уравнения (5.8.41) можно рассматривать как систему п{т - 1) нелинейных уравнений относительно n{in-1) неизвестных (Ль Лг 4m-i> ) и одного параметра а. Для продолжения решения уравнений (5.8.41) в зависимости от параметра а можно вновь воспользоваться алгоритмом DERPER, который был описай в п. 5.8.4. Матрица Якоби О G, 2 -/ ...... .-10 О G , aF ,/ar dF Jda Здесь Gf- матрицы размера пХп, (5.8.42) дх,.(г.., IT) Г, а)- 1 ; ; 1 единичная матрица; -, /, р=1,...,/г, / -( (5.8.43) матрица Gj получается из матрицы Gj вычеркиванием й-го столбца; аналогично из / получается 7. Частные производные можно найти, используя уравнения в вариациях = Т °) и, (5.8.44) где [/ - матрица размера пХ - Если выбрать начальное условие в виде U{Zf) = I, то, интегрируя уравнения (5.8.44) иа интервале [zj,Zj+i], мы получим Gj = U(Zj+i). Для частных производных dFj/df имеют место соотношения дР,/дТ = Az,-f (х {Zi+г) I Л/, Т, а). (5.8.45) Частные производные dFj/da находятся интегрированием уравнений в вариациях, аналогичных уравнениям (5.8.44). В п. 5.8.3 мы говорили о структуре матрицы монодромии в случае метода простой стрельбы. В методе многократной стрельбы матрица монодромии имеет вид fi = G ,G 2 ... GGb (5.8.46) где матрицы G / = 1, 2, т-1, определяются формулой (5.8.43). Отметим, что столь простую структуру матрицы монодромии невозможно получить при использовании разностных методов. Метод многократной стрельбы был нами использован для нахождения сильно неустойчивых периодических решений в так называемой модели Ходжкина-Хаксли передачи возмущения по нервному волокну [5.20], а также для продолжения по параметру периодических решений задачи 8 [5.29]. системы (5.8.41) имеет вид Gi -I О ... dFildT dfi/da О Ог -/ ... dFJdT dFJda Отметим в заключение, что в то время как при использовании разностного метода нам приходилось брать порядка ста точек деления, в случае применения метода многократной стрельбы число точек деления было существенно меньше. Практический опыт показывает [5.20], что уже десяти точек бывает вполне достаточно. 5.9. ХАОТИЧЕСКИЕ АТТРАКТОРЫ Материал данного параграфа основывается на сведениях, изложенных в п. 2.5.2, где были введены понятия аттрактора и хаотического инвариантного множества. Хаотическое инвариантное множество, представляющее собой аттрактор, называется хаотическим (странным) аттрактором. Наличие хаотического аттрактора в фазовом пространстве системы дифференциальных уравнений служит причиной сложного поведения траекторий системы в его окрестности. При этом мы говорим о хаотическом поведении траектории (или решения данной системы). Пример такого поведения изображен на рис. 5.32. О существовании сложных траекторий в автономных системах обыкновенных дифференциальных уравнений с размерностью, больше или равной трем, было известно еще Пуанкаре. Лоренц в работе [4.40] на простом численном примере [задача 10 при значениях параметров а =10, ft = 8/3, /- = 28) продемонстрировал наличие хаотического поведения решений. Один из механизмов возникновения хаотического множества связан с последовательностью бифуркаций удвоения периода (или бифуркаций типа -1 , см. § 5.8, 2.3 и 2.5). Этой последовательности бифуркаций часто соответствует сходящаяся последовательность {а„} бифуркационных значений параметра а. Положим lima = a. В случае если а„ / (или соот- П-*<х> ветственно а„\.аоо) при а > а, (соответственно а < осо) в фазовом пространстве системы x = f(x, а) существует хаотическое множество (см. рис. 5.34f). Ниже мы рассмотрим некоторые методы анализа хаотических аттракторов. Для описания хаотического аттрактора мы будем использовать показатели Ляпунова (см. § 2.5) или будем изучать его структуру с помощью отображения Пуанкаре. Хаотический аттрактор характеризуется наличием хотя бы одного положительного одномерного показателя Ляпунова или тем, что инвариантное множество соответствующего отображе- ния Пуанкаре имеет характер канторова множестваБолее подробно вопросы возникновения и анализа хаотического пове- 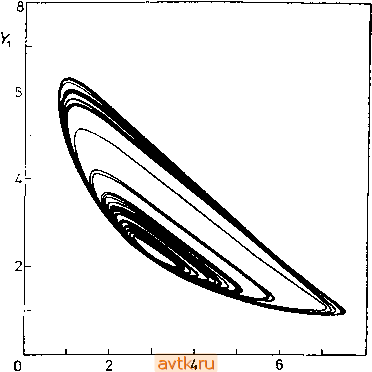 Al 8 Рис. 5.32. Фазовый портрет задачи 8, N=2, Л i= 2, fi = 5,9, Dj = 1,21, D2= 12,1. Часть хаотической траектории в проекции на плоскость Xi-Y. дения систем с соответствующими приложениями рассматриваются в работе [5.18]. 5.9.1. Вычисление показателей Ляпунова Рассмотрим систему п дифференциальных уравнений = f(x, а), (хе R ), aRK (5.9.1) > Понимание смысла последнего высказывания для дальнейшего не обязательно. - Ярмж. ред. Я1(х„; v?)= to-ln-. (5.9.2) Соответствующий й-мерный показатель задается соотношением (5.9.3)
Я*(х„; v°. ....v°)= limi-ln Здесь wiAw2 ... Awsll есть объем -мерного параллелепипеда, образуемого векторами Wi, ..., w*. В формулах (5.9.2) и (5.9.3) есть решение линеаризованного уравнения = --(ф(0)У. (5.9.4) для которого уДО) = у? (матрица di/dx вычисляется в точках выбранной траектории x = ф(/) системы (5.9.1)). Замечания 1. Предел в формуле (5.9.2) существует для почти всех хо и векторов Vi. 2. При случайном выборе линейно независимых векторов Vp v° формула (5.9.3) с вероятностью 1 дает максимальный -мерный показатель Я^ (см. теорему в п. 2.5.1) Вычисление одномерных показателей Ляпунова обычно проводится следующим образом. С помощью формулы (5.9.3) подсчитываем П максимальных показателей Я|пах, Ятах, Ятах и затем находим одномерные показатели Я'Я' ... Я^ с помощью соотношений я! = Ятах, Яй = Ятах - Ят1х , k = 2,...,n, (5.9.5) поскольку каждый -мерный показатель представляет собой сумму k одномерных показателей (см. п. 2.5.1). Если подсчитывать показатели Ляпунова с помощью выражения (5.9.3), то у нас могут возникнуть трудности вычислительного порядка. Так, например, если точка Xq лежит на хаотической траектории, то с ростом t векторы увеличиваются, а углы между ними уменьшаются, в результате чего вычисление > Для придания точного смысла этим утверждениям нужно расшифровать термины почти все и с вероятностью I . - Прим. ред. В П. 2.5.1 МЫ ввели определение показателей Ляпунова. Напомним, что для траектории системы (5.9.1), которая в момент /=0 проходит через точку Хо (при фиксированном значении а), одномерный показатель Я' определяется как 1 J\ 1 ... 20 21 22 23 24 25 26 ... 36 |
|
© 2004-2025 AVTK.RU. Поддержка сайта: +7 495 7950139 в тональном режиме 271761
Копирование материалов разрешено при условии активной ссылки. |
 Экструзия композитов
Экструзия композитов Угловые шкафы
Угловые шкафы Искусственная кожа
Искусственная кожа Детская кроватка
Детская кроватка Мебель для ванной
Мебель для ванной Выбираем мебель
Выбираем мебель Ткань для мебели
Ткань для мебели Подъемная кровать
Подъемная кровать Шторы для дома
Шторы для дома Поролон
Поролон