

|
|
|
Разделы
Публикации
Популярные
Новые
|
Главная » Применение операционных усилителей 1 ... 10 11 12 13 14 15 16 ... 57 б) Для ответа на этот вопрос просто вычислим значение Ueux интегрированием в пределах от <о = О до = 3 мс: f = 3 мс t = 0 (IB) = 3 мс t = 0 (1 МОм) (0,1 мкФ) = - 10 (IB) (3 мс) - [- 10 (IB) (0)] = - 30 мВ. Отметим, что результат интегрирования выражается в виде f/вых = - (1/ВД ( - fo) = - (URC) At, и этим выражением можно всегда пользоваться в случае, когда Uex - прямоугольный импульс или прямоугольная волна. + 56 -68 - + 1.г5В а  -1Л5Ъ ~ Рис. 6.4. Реакция интегратора на прямоугольные колебания, в -входной сигнал; б -выходной сигнал. Конечно, через некоторое время, когда выходное напряжение достигнет уровня, максимально возможного для данного усилителя, интегрирование прекратится. Пример 6.2. В интеграторе R = 10 кОм и С = 0,1 мкФ; С/вх - это прямоугольная волна с частотой 1 кГц и амплитудой 5 В (размах 10 Б от пика к пику). Каким будет выходное напряжение? Решение: Поскольку сигнал периодический, для описания выходного напряжения достаточно рассмотреть один полный период. Прежде всего запишем входное напряжение как функцию времени (рис. 6.4, а). Имеем Ux = 5 В при ti<t t2, t/вх = -5 В при /2 < < < h. Эту функцию можно интегрировать на каждом из ее полупериодов. Для описания выходного сигнала достаточно выяснить его форму и значения напряжений на концах каждого полупериода. Подставляя постоянное напряжение U в выражение (6.2), получаем после Интегрирования f/вых = - {.\IRC) Udt = - (U/RC) t. Каж онную прямую на каждом полупериоде. Поскольку Ubx является на *Дом полупериоде ступенчатой функцией, этого результата можно было *идать, исходя из предыдущего примера. f = 0,5 мс БВ (0,5 мс) f = 0 ~ (10 кОм) (0,1 мкФ) Mi£4L= 2,5B. 1.10- Накопленное напряжение за второй полупериод между <2 и <з равно / = 1 мс (-5 В) ------\>з - (-5 В) (0,5 мс) ~ (10 кОм) (0,1 мкФ) rj (-5 В) / = 0,5 мс ~ RC 2,5В. и Полученный выходной сигнал показан на рис. 6.4, б 2). Размах этого сигнала от пика к пику равен 2,5 В. При любом сигнале на входе изменение сигнала на выходе должно начинаться от того значения, которое выходной сигнал имел к моменту прихода входного сигнала (так, когда Ubx становится равным -5 В, выход-  /j /j ной сигнал начинает возрастать Время от значения -1,25 В). Если бы размах прямоуголь- %e7rl Z7° ной волны в примере 62 был ра- вен, например, 5 или 2,5 В, то размах выходного сигнала оказался бы равным 1,25 или 0,625 В соответственно. Пример 6.3. На вход интегратора подано пилообразное напряжение, показанное на рис. 6.4,6. Какова будет форма выходного сигнала? Решение: Выражая Ubh как функцию времени на интервале от ti до <2, получаем t/вх = - {U/RC) t-Kt, < < < h, тде К = -~ (UIRC). Используя теперь выражение (6.2), получаем и и^ых = - ШС) -Kdtt Отсюда видно, что напряжение на выходе - это квадратичная функция времени (парабола), показанная на рис. 6.5. ) Это не абсолютное значение напршкения, а его изменение за полупериод (1). - Прим. ред. 2) Расположение этого сигнала относительно О В зависит от начальных условий на выходе интегратора. Если они равны нулю, то на рис. 6.4 должно соблюдаться соотношение h - ti = 2{ti - Qi).- Прим. ред. Накопленное напряжение в конце первого полупериода, т. е. интервала между tx и ti, равно ) 6.2. О РЕАЛЬНОМ ИНТЕГРАТОРЕ До сих пор операционный усилитель в интеграторе считался идеальным. В действительности реальный операционный усилитель имеет некоторое напряжение сдвига и нуждается в некотором токе смещения. Напряжение сдвига интегрируется как ступенчатая функция, что дает дополнительный линейно-нарастающий (или спадающий) выходной сигнал, причем полярность этого сигнала определяется полярностью И^кв, а наклон - величиной б'сдв. Ток смещения течет через конденсатор обратной связи, что также приводит к появлению наклонного выходного сигнала. В результате действия этих двух эффектов) конденсатор обратной связи через некоторое время неизбежно заряжается до максимально возможного выходного напряжения усилителя. Такое постепенное накопление заряда на конденсаторе обратной связи накладывает ограничение на интервал времени, в течение которого может быть осуществлено интегрирование с достаточной точностью. Кроме того, б'сдв добавляется к напряжению на конденсаторе, и, поскольку это напряжение равно f/вых, такая прибавка вносит в результат ошибку, равную f/сдв- В итоге выражение для (Увых в (6.2) принимает вид t/вых = --\Uldt + \Uc.dt + \h.dt+ [/сдв. (6.3) Последние три члена в правой части равенства (6.3) соответствуют указанным выше ошибкам, а первый член описывает полезный выходной сигнал. Знаки погрешностей могут быть любыми по отношению друг к другу и к полезному сигналу. Ошибку напряжения сдвига можно уменьшить следующими приемами: 1) использовать операционный усилитель с низким [/сдв; 2) периодически сбрасывать интегратор (т. е. разряжать конденсатор до некоторого заранее выбранного значения); 3) шунтировать С сопротивлением Rp, как показано на рис. 6.6. Все три слагаемых ошибки интегратора уменьшаются при использовании этих приемов. Шунтирование конденсатора обратной связи сопротивлением Rp позволяет на низких частотах, где конденсатор фактически действует как разомкнутая цепь, ограничить напряжение ошибки величиной {Rp/R)iJcKB вместо Л [/сдв- К несчастью, такое шунтирование одновременно ограничивает снизу область частот, в которой происходит интегрирование. Например, на рабочей частоте f == 3/2nRpC точность интегрирования составит около 5 %; увеличение рабочей частоты выше величины l/2nRpC Приведет к увеличению точности. ) Они практически никогда не компенсируют друг друга полностью, но Могут и складываться, и вычитаться, - Прим. ред. Слагаемое ошибки в правой части равенства (6.3), связанное с током смещения, можно уменьшить за счет использования операционного усилителя со входом на полевых транзисторах или путем подключения между неинвертирующим входом и землей сопротивления /?комп, равного R \\ Rp, если в схеме уже использовано сопротивление Rp). Этот способ компенсации /см аналогичен способу компенсации /см в различных усилителях, р  -о вых I I I Рнс. 6.6. Коррекция ошибки интегратора в случае медленно меняющегося сигнала. Ключ Кл служит для периодического сброса конденсатора С. Сопротивление Hp служит для уменьшения эффекта V. Сопротивление кош уменьшает эффект I указанному в гл. 2. Схема включения сопротивления /?комп показана на рис. 6.6. При использовании такого сопротивления третий член в правой части равенства (6.3) принимает вид (1/С)5сдвЛ. Иногда сопротивление /?комп шунтируют конденсатором Скомп, таким, что Rex. усСвх. ус ~ /компСкомп, ЧТО одноврсменно обсспе-чивает частотную компенсацию (симметрирование входов). Использование усилителя, стабилизированного прерыванием, также помогает снизить ошибки, возникающие за счет б'сдв, /см и /сдв- Для установки нуля сдвига усилителя, используемого без резистора обратной связи Rp, конденсатор С следует зашунти- Если Rp не используется, следует положить йкомп ровать сопротивлением, которое отключается после установки нуля (при переходе в рабочий режим). Конденсаторы, используемые в интеграторах с большими временами интегрирования, должны иметь очень высокое собственное параллельное активное сопротивление (т. е. очень малые утечки). Хорошую стабильность на больших временах обеспечивают тефлоновые или полистироловые конденсаторы. При более коротких периодах интегрирования и на достаточно высоких частотах (около 1 кГц и выше) интегрируемых сигналов хорошие майларовые конденсаторы часто дают вполне удовлетворительные результаты. 6.3. ЧАСТОТНАЯ ХАРАКТЕРИСТИКА ИНТЕГРАТОРА Частотная характеристика интегратора на полностью скорректированном по фазе операционном усилителе показана на /?р ?,ДБ 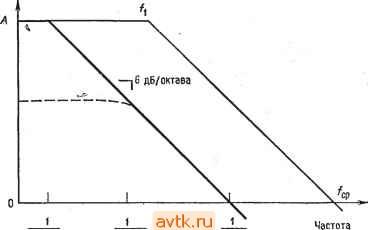 Рис. 6.7. Частотная характеристика интегратора, нкая линия - характеристика усилителя; жирная линия характеристика интегратора 3 обратной связи; штрихпунктнрная лнння - характеристика интегратора при наличии сопротивления кр. рис. 6.7. Мы ВИДИМ, ЧТО для интегратора без резистора обратной связи (рис. 6.2) полоса частот, в которой происходит инте-Рирование, расположена между нижней сопрягающей частотой ) С этим трудно согласиться. Из рис. 6.7 видно, что частотная характе-жстика правее 1/2яйС соответствует интегрирующему звену вплоть до ср. - Прим. ред. Предполагается, что коэффициент IjRC выражается в с-К - Прим. ) Это показывает, что оценивать ошибки интегратора просто по fi нельзя. На самом деле, если допустимая погрешность равна 6, а рабочая частота /, то, грубо говоря, следует выбирать f, = 6f. - Прим. ред. интегратора и частотой среза интегратора'). Первая граничная частота интегратора равна l/2nARC, где А появляется в знаменателе из-за эффекта Миллера. Для очень хороших операционных усилителей погрешность оказывается равной примерно 5 % на частоте, втрое большей нижней сопрягающей частоты, и остается на уровне ниже 1 % на всех частотах, превышающих нижнюю сопрягающую частоту более чем в 10 раз. Частота среза интегратора равна \/2nRC. Добавление к схеме сопротивления Rp для улучшения стабильности на низких частотах приводит, как видно из рис. 6.7, к увеличению нижней сопрягающей (граничной) частоты. Это - прямое следствие ослабления эффекта Миллера, связанного со снижением коэффициента усиления на низких частотах от А до величины Rp/R. Нижняя граничная частота скорректированного интегратора составляет L = m2nR {Rp/R) С] = \l2nRpC. (6.4) Таким образом, полоса частот, в которой возможно интегрирование, в этом случае уже и лежит между \/2nRpC и частотой \/2nRC. Пример 6.4. Интегратор будет использоваться на частотах около 20 кГц. Точность интегрирования должна быть не хуже 2 %, а желательная характеристика интегратора имеет вид Vur. - - 500 Uxdi), Найти С и Rp. Решение: Выберем разумное значение С так, чтобы конденсатор имел легко доступный номинал, и вычислим R. Пусть С = 0,1 мкФ. Имеем вь,х = =-{\RC)\Vвxdt, поэтому -5000 = -(1/7?С), откуда 7? = 1/5000С = = 1/5000(0,1 мкФ) = 2 кОм. Можно было бы таким образом испробовать несколько значений С, чтобы подобрать разумные значения как для R, так и для С, однако значения Р = 2 кОм и С = 0,1 мкФ уже выглядят разумными. Далее, желательная точность интегратора равна 2 %; если рабочая частота интегратора превышает его нижнюю сопрягающую (граничную) частоту более чем в 10 раз, то точность интегратора даже превысит это значение. Поэтому зададим нижнюю граничную частоту интегратора равной 2 кГц и вычислим необходимое для этого значение Rp: Rp=\/2nUC, где fi -нижняя граничная частота, так что Лр = I/2n/iC = 1/6,28(2 кГц) (0,1 мкФ) = 796 Ом. Полученное значение Рр бессмысленно, так как при нем коэффициент усиления на низких частотах оказывается меньше 1 ). Такой результат получается довольно часто Теперь нам надо выбрать значение 6.4. СХЕМЫ ОГРАНИЧЕНИЯ Под ограничением понимается ограничение напряжения на выходе операционного усилителя на некотором уровне, меньшем, чем максимально возможное выходное напряжение усилителя; ограничение должно соблюдаться и в тех случаях, когда напряжение на входе усилителя превышает максимально допустимое значение. Идеальная схема ограничения не должна оказывать никакого влияния на выходное напряжение до тех пор, пока последнее не достигнет заданного уровня ограничения, после чего схема ограничения должна остановить дальнейшее повышение выходного напряжения. Ограничение используется для того, чтобы предотвратить насьщение операционного усилителя, т. е. состояние, в котором напряжение на выходе достигает максимального значения, которое данный усилитель может обеспечить). Это состояние нежелательно, так как после насыщения (т. е. после прекращения подачи на вход чрезмерного входного напряжения) усилитель возвращается в исходное состояние гораздо медленнее, чем если бы он удерживался от насыщения при помощи схемы ограничения. Например, возвра- ) Точнее, входной сигнал прн насыщении оказывается больше, чем надо для достижения имеющегося максимального выходного. - Прим. ред. Rp, при котором коэффициент усиления на низких частотах имеет достаточно большое значение, и проверить, какой получается первая граничная частота интегратора, чтобы убедиться, лежит ли она ниже 2 кГц. Положим Rp/R = = 2000 (тогда Лр = 4 МОм) и посмотрим, чему равна fi: fl = 1/2я7?рС = 0.39 Гц < 2кГц. Итак, если положить R = 2 кОм, С = 0,1 мкФ н Лр = 4 МОм, интегратор будет иметь достаточную точность на частоте 20 кГц. Заметим, что частотная характеристика стабилизированного по сдвигу интегратора (Rp включено, рис. 6.6) представляет собой частотную характеристику фильтра низких частот со спадом 6 дБ/октава и с коэффициентом усиления, большим единицы. Поэтому наша схема может быть использована во всех тех случаях, когда нужен подобный активный фильтр. Чтобы его построить, надо задать R и Rp, при которых получаем желательное значение К, и найти С по формуле C=l/2nRph. (6.5) Пример 6.5. Нам надо использовать интегратор в качестве фильтра низких частот, у которого fi=S кГц я К = 20. Решение: Положим i?i = 10 кОм и 7?р = 207?i = (20) 10 кОм = 200 кОм. Тогда С = 1/2яЛрЛ = 1/2п(200 кОм) (3 кГц) = 265 пФ. Поэтому в схему надо поставить Ri = 10 кОм, Rp = 200 кОм и С = 265 пФ. щение в исходное состояние усилителя со стабилизацией прерыванием после насыщения может потребовать нескольких секунд. Ограничение используется во многих типах схем на операционных усилителях, а не только в интеграторах, но его использование в интеграторах оказывается особенно полезным, по- Ограничивающая цепь I-----1 ►I X I 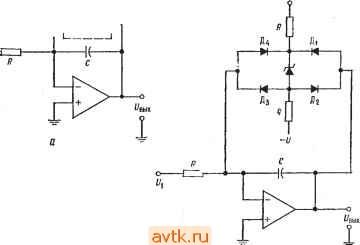 Рис. 6.8. Схемы ограничения. а-схема ограничения на стабилитронах; б - мостовая схе ма на диодах и стабилитроне, скольку заряд конденсатора обратной связи способствует сохранению состояния насыщения, если оно однажды наступило. Один из типов схем ограничения показан на рис. 6.8, а. Два соединенных встречно стабилитрона на рис. 6.8, а образуют простейшую схему ограничения напряжения; выходное напряжение такой схемы ограничено величиной t/вых. макс ~ t/стаб 4 0,7 В = Uо^р. Если б'вых превосходит напряжение ограничения, стабилитрон начинает проводить ток. Поскольку стабилитрон в проводящем состоянии -имеет очень низкое полное сопротивление, коэффициент усиления усилителя по отношению к любому дальнейшему увеличению входного напряжения оказывается также очень малым. Если же б'вых не превышает напряжения ограничения, то коэффициент усиления усилителя определяется полным сопротивлением элемента обратной связи (в данном случае С), так как полное сопротивление стабилитрона в непроводящем состоянии весьма велико. Утечка в показанной на рис. 6.8, а схеме ограничения на стабилитронах может оказаться слишком большой для прецизионных схем. В показанной на рис. 6.8,6 диодной схеме ограниче- НИЯ используются маломощные диоды с малыми токами утечки. Диоды включены встречно, и ток через них не идет до тех пор, пока не будет превышено напряжение ограничения, равное сумме напряжения стабилитрона и падений напряжения на двух диодах в прямом направлении. Если это напряжение превышается, диоды начинают проводить ток, подключая к схеме стабилитрон и снижая коэффициент усиления. Если б'вых превышает положительный уровень ограничения, то проводят ток диоды Дх и Дз, если же б'вых переходит отрицательную границу, то ток идет через Дг и д4. Величина сопротивлений R выбирается по следующей формуле: Ток стабилитрона /стаб должен быть меньше, чем выходной ток операционного усилителя. 6.5. СУММИРУЮЩИЙ ИНТЕГРАТОР Количество входов интегратора не обязательно равно одному. Схема суммирующего интегратора с п входами показана 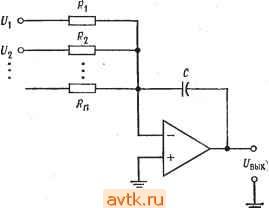 Рис. 6.9. Суммирующий интегратор. ма рис. 6.9. Из рисунка видно, чтoд = гJ ++ ... +, так Что - С (dUJdf) = (UxjRx) + {UJR2) +...+ (UJRJ. При Ri = R2 = ... =Rn имеем = - (t/i + f/2 + ... ... + Un)/CRi. Проинтегрировав это равенство, получим =- iURC) S(t/,+1/2 +. .+1/ ) dt. (6.6) 6.6. ИНТЕГРАТОР-УСИЛИТЕЛЬ Если последовательно с конденсатором обратной связи включить сопротивление (рис. 6.10), то выходное напряжение ока- 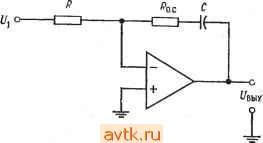 Рнс. 6.10. Интегратор-усилитель. вых = -%,~$£.г'- жется линейной функцией входного напряжения и интеграла по времени от входного напряжения. Такая схема фактически объединяет интегратор и усилитель. Напряжение на ее выходе имеет вид t/вых = - (Ro. JR) и, - {lIRO \ [/, dt. (6.7) Как и предыдущая схема, интегратор-усилитель может иметь более одного входа. 6.7. РАЗНОСТНЫЙ ИНТЕГРАТОР Разностный интегратор формирует интеграл по времени от разности двух сигналов. Его схема показана на рис. 6.11, а выходное.напряжение имеет вид U.b.x = (MRC)\{U2-Ui)dt. (6.8) 1 ... 10 11 12 13 14 15 16 ... 57 |
|
© 2004-2026 AVTK.RU. Поддержка сайта: +7 495 7950139 в тональном режиме 271761
Копирование материалов разрешено при условии активной ссылки. |
 Экструзия композитов
Экструзия композитов Угловые шкафы
Угловые шкафы Искусственная кожа
Искусственная кожа Детская кроватка
Детская кроватка Мебель для ванной
Мебель для ванной Выбираем мебель
Выбираем мебель Ткань для мебели
Ткань для мебели Подъемная кровать
Подъемная кровать Шторы для дома
Шторы для дома Поролон
Поролон