

|
|
|
Разделы
Публикации
Популярные
Новые
|
Главная » Температурная зависимость смещения 1 ... 35 36 37 38 39 40 41 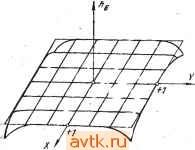 Общая погрешность нелинейности является взвешенной суммой hix и hiy-. KhX + hY. (8.70) Влияние погрешности проявляется в том; что она стремится загнуть вниз углы поверхности погрешностей, как показано на рис. 8.23. Следовательно, значения Rx и Ry следует выбирать так, чтобы, макси-Р . 8.23. Пофешл.о,сш, обус- ь™ входные напряжения не .ловленные нминейностью в?од- превышали 75-80% величин Uxo иых шреофазовдаелей и Uyo- 8.6.8. Частотная погрешность Аналоговые леремиожители работают во временном режиме. Следовательно, нельзя получить частотные характеристики передачи сигналов одновременно по обоим каналам. Поэтому можно раосмот|реть реакцию на входной сигнал одного из .каналов при условии, что :на другой вход подан сигнал постоянного тока или довольно низкой частоты. На эти частотные характеристики влияют следующие факторы: а) выходная емкость интегрального пе-ремиожителя, являющаяся дополнительной нагрузкой к резисторам Ri и R2 или Ru; б) частотная зависимость параметров выходного преобразователя, которая имеет особенно большое значе- ие, если- в качестве такого преобразователя ишользуется разностный усилитель на основе ОУ; в) паразитные емкости резисторов обратной связи Rx и Ry вхо'ДНых преобразователей; г) частотная зависимость коэффициентов преоб|разования IzUx и IzIIy че--тырехквадрантного перемножителя на основе управляемых источников тока. Обычно передаточная функция по каждому каналу имеет два -главных полюса и один нуль. Один полюс 0пре|деляется выходной емкостью и сопротивлением нагрузки, а другой - полосой пропускания разностного усилителя. Положение нуля обусловлено двумя факторами: ооцротивлениями цепи обратной связи Rx. и Ry vi ем1Костями, которые являются нагрузкой для этих резисторов. Этот нуль обеспечивает некоторое ослабление частотной зависимости. Однако указанное ослабление вызывает быстрое возрастание погрешностей, связанных с нелинейностью, поскольку ток управле-,ния возрастает с частотой. Частотно-зависимую погрешность можно представить в виде -ошибки по фазе <рй(сй) и амплитуде Я„((в). На частотах, значи-тельно меньших пре|дельной частоты, щ - линейна.я, а ha - квад--ратичная функция частоты и. Следовательно, на относительно низких частотах первая составляющая является существенной, а ;sтqpoй можно пренебречь. Обычно на практике фазовую погреш- иость характеризуют так называемой векторной ошибкой, которую определяют следующим образом: U = 2XYs\n((fj2). (8.71) Если выходным преобразователем является разностный усилитель на основе ОУ, то будут накладываться существенные ограничения на скорость нарастания выходного сигнала S и частоту полной мощности /пм перемножителя. Перемножители, в выходных преобразователях которых используются фазосуммирующие цепи, свободны от этих ограничений. В них параметры S и / м зависят только от внешних емкостей, нагрузки. 8.7. Компенсация погрешностей четырехквадрантных перемножителей. Процедура настройки Поверхность погрешностей полных перемножителей, содержащих четырехнвадрантную базовую цепь и выходной преобразователь (см., например, рис. 8.31), сильно деформирована, как показано на рис. 8.24а. С целью минимизации погрешностей можна= использовать цифровой вольтметр, высокочувствительный осцил-лопраф или устройство для построения поверхности погрешностей Процедура настройки перемножителя заключается в том, чтобы путем регулировки смещения и масштЗбных коэффициентов добиться того, чтобы вся поверхность или по крайней мере ее часть ограниченная единичными напряжениями, возможно ближе приблизилась к координатной плоскости XY. Метод вольтметра 1. Первый этап заключается в том, чтобы установить нулевое выходное напряжение смещения Uz вых ск путем соединения с землей обоих входов и подст|Р'ОЙки выходного напряжения Uzk до-тех пор, пока не будет получено Uz=0. В результате этого начальная точка поверхности погрешностей будет совмещена с плоскостью XY, как показано на рис. 8.246. Это значит, что устранены погрешности, обусловленные начальным смещением и конечным значением коэффициента подавления синфазной составляющей напряжения выходного преобразователя. 2. Второй этап состоит в том, чтобы установить нуль начального смещения /увх.см по каналу У путем заземления его входа,. подаЧ'и на вход X напряжения равного примерно 2/3 Uxo, подведения к инвертирующему входу входного преобразователя Uy- /у напряжения смещения Uy и его регулИровки до получения Uz=0. В результате этО'ГО как начальная точка, так и точка с координатами {Ux=Uхи t/y=0) будут совмещены с плоск'остьк) АУ. Если ограничиться компенсацией погрешностей, pacdMOTpen-кык в § 8.6, то можно- считать, что на двух первых этапах осуществляется установка нулевой погрешности -.вдоль всей оси X, как показано на рис. 8.24в. 3. Оо1а.е|ржанием третьего этапа является установка нуля по каналу X. Для этого вход X заземляется, на вход Y подается напряжение положительной полярности, равное примерно 2/3 Uyo, ж инвертирующему входу входного преобразователя Ux-Ix под-:водится напряжение смещения Uxc и осуществляется его регулы 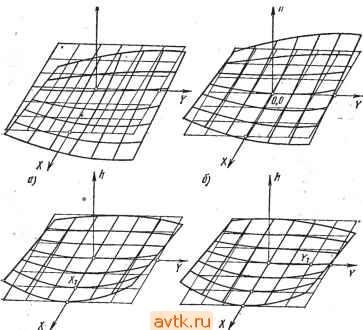
Vmc. i8.24. Дефюршция шов'фх.ности погрешностей в процессе 1наст1ройки по методу щифроБого вояьт1меТ|ра лировка до получения Uz=- В результате Т|ретья точка поверхности погрешностей (ic координатами f/x=0, Uy=Uyi) совместится с плоскостью XY, как показано на рис. 8.24г. В точке {Ux= -=0; Uy=-Uyi) может иметься значительная остаточная по- грешность, поскольку погрешность вдоль оси У является квадра* тичной функцией Uy- (Заметим, что поскольку между смещениями входных и выходных цепей имеется некоторая зависимость,., может возникнуть необходимость в шовторении этапов с 1 по 3.) 4. Четвертый этап заключается в подборе масштабного коэффициента путем подведения к соответствующим входам положительных единичных напряжений (которые не обязательно равньЕ между собой) и регулировки потенциометра для установки; тока /б таким образом, чтобы Uzi = KU.xiUyi- Это приведет к устранению погрешности в точке {Ux=Ux\; Uy=Uyi), в результате чего уже четыре точки окажутся совмещенными с плоскостью XY, как показано на рис. 8.245. Данный метод особенно эффективен в двух квадрантах, соответствующих -UxiUxUxi; Ot/yt/yi. .В других двух квадрантах будет обеспечена не такая высокая точность, так как в* них имеются значительные остаточные погрешности. В связи с тем, что перемножители, как правило, должны работать во всех, квадрантах, более цредпочтительным может оказаться метод, который оставляет некоторые погрешности вдоль границ раб'очеи области, но обеспечивает минимизацию погрешностей во- всей этой области. М е т о д о с ц и л л о гр а ф а 1. Первый этап, имеющий своей задачей установку нуля на выходе f/zBbix.cM, выполняется так же, как первый этап предыдущего метода. 2. Целью второго этапа является минимизация начального смещения t/увх.см по каналу У при помощи измерительной схемы показанной на рис. 8.25а. При этом соответствующее напряжение регулировки смещения t/усм изменяется до тех пор, пока весьма, близкая к прямой линия поверхности погрешностей, соответствую-, щая У=0, не окажется на экране гчризоцтальной. Тестовый сигнал может быть низкочастотным (50 Гп,) синусоидальным колебанием с амплитудой Ux\- 3. Третий этап направлен на минимизацию напряжения смещения Uxbx.cm по другому кзналу при помощи измерительного устройства на рис. 8.256. При этом напряжение смещения Uxcm изменяется до тех пор, пока близкая к параболе второго порядка линия на поверхности погрешностей, соответствующая Х=0, не станет симметричной относительно оси h- В результате остаточная П01]решность при Uy - Uy\ станет равной остаточной погрешноств при Uy=-Uyi- В .прО'цессе выполнения этого этапа можно применить синусоидальный сигнал с частотой 50 Гц и амплитудой 4. В процессе четвертого этапа производится настройка масштабного коэффициента при пОМощи измерительной схемы на рис. 8.25в. В этом случае за счет регулир'овки потенциометра, задающего ток /б , линия (-UyiUyUyu Ux=-Ux\) на по- верхнюсти тогрвшиостей делается симметричной относительно оси h. В результате в каждом углу поверхности погрешностей будут установлены остаточные нолрешности примерно одинакового значения. В качестве тестового сигнала можно использовать сину-Соидальное колебание с амплитудой t/yi и частотой 50 Гц. 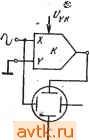
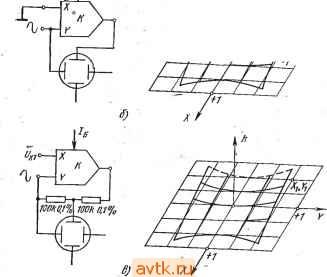 Рис. 8.25. Дефо.рмация пс)верХ]Н.ости иофешностей в шроцессе ластрюйки по методу юсциялОГ1рафа 5. В случае жестких требований к точности можно выполнить оптимизацию поверхности погрешностей по критерию минимума С1реяней погрешности.. Этого можно достигнуть путем многократного повторения этапов 1-4 и распространения процедуры настройки на другие линии повер'яности погрешностей. В отношении точности канал X перемножителя всегда предпочтительнее канала У. При повышенных требованиях к точности целесообразно снижать ток управления в канале У путем увеличе- иия Ry- Возникающее при этом уменьшение масштабного коэффициента следует скомпенсировать посредством увеличения сопротивления i?k или Rh. Метод отобр ажения поверхности погрешностей. При помощи специального тестового оборудования вся поверхность погрешностей перемножителя может быть воспроизведена на экране осциллографа. Процедура настройки показана на рис. 8.26. (Поверхность погрешностей воспроизведена для случая Ljn = [/ri=10 В. Чувствительность по вертикали 2%/см.) 1. На первом этапе устанавливается нуль выходного нащряже-ния Uzвыхсм. При этом нзчало поверхности погрешностей совмещается с плоскостью координат (рис. 8.266).  -Рас. 8.26. Деформация товерхиосши игопрешностей в процессе наспройки при шомощв .специального тестювоте оборудова.ния 2. Цель второго этапа - минимизация напряжения смещения Л'увхсм по каналу У. Настройка выполняется до тех nqp, пока Ось X поверхности погрешностей не совместится с плоскостью кo.qpдинaт (см. рис. 8.26е).- 3. Третий этап аналогичен второму; напряжение С/хвхсм подстраивается до .совпадения осей У (см. рис. 8.26г). 4. Масштабный коэффициент подстраивается до тех пор, пока не будет достигнуто наилучшее совмещение поверхно.сти погрешностей с плоскостью координат (см. рис. 8.26д). Этот м'бтод весьма эффективен, поскольку остаточные погрешности оказываются довольно малыми. Если оптимизация ограничивается только одним квадрантом, то остаточеые погрешности в этом квадранте могут быть существенно уменьшены, но, естественно, они возрастут в остальных трех квадрантах (см. рис. 8.26е). 8.8. Переключающие перемножители Во многих применениях (модуляторах, демодуляторах и т. п.) требуется, чтобы один или оба канала перемножителя действовали в режиме переключения. В таких случаях линейность характеристики не имеет значения. Этого нельзя сказать о быстродействии, которое в.данной ситуации приобретает особое значение. Перемножители^ построенные на основе трех дифференциальных каскадов, управляемых напряжением (см. § 8.2), имеют принципиально более высокое быстродействие, чем перемножители на ос--нове источников, управляемых током (см. § 8.3). Если сигналы управления (синусоидальные или прямоугольные) имеют достаточную амплитуду, то каналы У весьма пригодны для работы в режиме переключения. Канал X может быть линеаризован при помощи обратной связи по току. Перемножитель такого типа показан на рис. 8.27а. Из рассмотрения его эквивалентной схемы, приведенной на рис. 8.276,   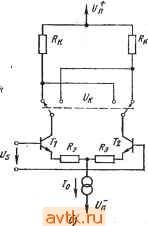 PiHic 8.27. Переключающий шеремножитель: a - принципиашнная .схема; б - энв'ивалентная схема можно видеть, что дифференциальный каскад действует как источник двух П]ротивофазных токов, пропорциональных напряжению Us{t). Эти токи затем подаются на нагрузку через пару синхронных переключателей тока. Дифференциальная составляющая входного напряжения пропорциональна произведению входного нап]ряже ия Us{t) и коммутирующего .сигнала S{t). Представляя последнее в виде ряда Фурье для прямоугольных сигналов, получаем - . U, = 2KUsif)i f cosnco. (8.72) n=l За исключением напряжений постоянного тока, выходное напряжение, как показано на рис. 8..27а, симмет1рично. Одной из наиболее типичных областей применения переключающих перемножителей является модуляция. Пусть Us{t) представляет собой синусоидальный модулирующий сигнал с частотой Шм и амплитудой С/м, а 5(0 - синусоидальный сигнал несущей частоты Он с достаточно большой амплитудой. Тогда спекпр выходного напряжения можно представить t/,x = 2/Ct/,cosco,f5-iHLcosnco,f. (8.73) Требуемую'боковую полосу частот (обычно сон-сом) можно по-л} чить при помощи фильтрации. Теоретически составляющие с частотой (Ом и сон не Должны появляться на выходе. В действительности на выходе устройства следует ожидать появления сигнала, у)ровень которого зависит от частоты и амплитуды входных сигналов. 8.9. Параметры перемножителей В технических характеристиках перемножителей приводится много параметров. Часть из них относится к дифференциальным усилителям, которые входят в состав перемножителей (см. § 5.3). Для описания свойств перемножителей наибольшее значение имеют следующие характеристики. Погрешность линейности (hx, hr). Это параметр, определяющий максимальное абсолютное отклонение поверхности погрешностей, характеризует остаточную погрешность перемножителя после настройки. В связи с тем, что точность в каналах X и У различна и погрешность увеличивается по мере удаления от начала координат, в технических характеристиках приводятся два различных параметра, характеризующих погрешность вдоль линий Ux=Uxi и Uy - Uyi поверхности погрешностей и выраженных в процентах от выходного напряжения (рис. 8.28). Математически это записывается Обычно t/jci = t/ri = 10 В. и Uy=± Uyl (8.74) просачивание сигнала через закрытый канал (Unpx, Uupy)- На выходе идеального перемножителя напряжение отсутствует, если хотя бы одно из входных напряжений равно нулю. Независимо от того, насколько тщательно изготовлен и настроен перемножитель, на его выходе при таких условиях всегда имеется небольшой-остаточный сигнал. Этот сигнал просачивания определяется погрещностями, которые соответствуют осям X и Y.  FiHiC. 8.28. Определоние и измереиие логрешиости, обусловленной нелиней- В связи с этим в технических характеристиках приводятся два параметра, из которых один соответствует заземленному входу X, а другой - заземленному входу У. При этом на незаземленный вход подается испытательное синусоидальное напряжение низкой частоты с амплитудой Ux\ или Uy\ (рис. 8.29). Напряжение просачивания определяется как размах переменного напряжения на выходе при указанных условиях, что математически записывается С/прХ =lC/zmax-mini ПрИ (7х = t/xi sin tOt/y = 0. t/ py= It/zmax -Zminl ПрИ t/x = 0, t/y = t/y Sm CO Погрешность квадрирования (Якв). Если оба входа включены параллельно, т. е. Ux = Uy, перемножитель работает в режиме квадратора. Погрешность квадрирования, другими словами. и,-и ипил Н \-oUz Y /. -и,
 Рнс. 8.29. Опредслеиие и измерение оквозного прюсамавания сишвала погрешность характеристики, преобразования в режиме возведения сигнала в квадрат, определяется как максимальное абсолютное отклонение поверхности погрешностей вдоль диагонали, соединяющей точки IIx = Uy = Uxi и Ux = Uy =-Uxu Она выражается в процентах от выходного напряжения Uzi = KUxu = 100 \Uz -IPx l,Wt/zi. (8.76) При соответствующей настройке эта диагональная погрешность может быть значительно меньше, чем погрешности, имеющиеся на других участках рабочей области. Масштабный коэффициент {К) определяется как коэффициент пропорциональности, связывающий выходное напряжение и произведение входных напряжений: K = Uzi/UxiUyi. -.. (8.77) Его незначительная зависимость от температуры и напряжения питания характеризуется следующими параметрами {АК/К):АТ, %ГС и (Л/С С):(АС/пп пп), %/% или [АК/К) :А[/пп, %/В. Полоса пропускания (/о или /i / ). В технических характеристиках приводятся предельные частоты /о или fi% , характеризующие полосы пропускания по каналам Х^и У соответственно. Первая из них равна частоте, на которой погрешность по амплитуде достигает 3 дБ, а вторая - это частота, на которой дополнительная погрешность равна 17о.. Для перемножителей, содержащих встроенный выходной преобразователь, обычно приводится также частота полной мощности / м. Векторная погрешность, фазо-векторная погрешность (Явект). Фазовый сдвиг в перемножителях может вызвать появление значительных погрешностей. Поэтому в техни- -ческих характеристиках приводится значение .частоты, на которой векторная погрешность, определяемая как . ч- . . /ве..-100 зш(Ф/2) 200зш(ф/2)100ф, (8.78) равна 1%. 8.10. Выпускаемые модели Все (выпускаемые модели интегральных перемиожителей (строятся на основе управляемой алряжен'ием четырехквадрантной схемы, показанной (Н-а рис. 8.13. Различаются модели (применяемыми (В них вспомогателнньми схемами. В ine,pe-множителях (всегда имеются (управляемые током источники токов / и /о/2. В большинстве случаев токи регулируются при (помощи внешних резисторов. В некоторых .моделях имеются встроенные (КоллектОрные резисторы Rk- В состав интегральной схемы в' ряде случаев наряду с (базовой -цепью (умножения включается (ВЫХОДНОЙ преобраз0(ватель в (виде разностного усилителя или фазо-сум'мирующей цегаи. В некоторых моделях ярименяются встроенные стабилизаторы тока или шанряжения, что- о-беспечивает (независимость то-ков и /о, а также напряжений смещения от а-пряжеиия питания. Различные модели ориентированы на (конкретные применения. В большинстве случаев технические характеристики достаточ1но -полны для -выбора тре-буемрй м-одели. . , 1в-1136 ; 385 1 ... 35 36 37 38 39 40 41 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2004-2026 AVTK.RU. Поддержка сайта: +7 495 7950139 в тональном режиме 271761
Копирование материалов разрешено при условии активной ссылки. |
 Экструзия композитов
Экструзия композитов Угловые шкафы
Угловые шкафы Искусственная кожа
Искусственная кожа Детская кроватка
Детская кроватка Мебель для ванной
Мебель для ванной Выбираем мебель
Выбираем мебель Ткань для мебели
Ткань для мебели Подъемная кровать
Подъемная кровать Шторы для дома
Шторы для дома Поролон
Поролон