

|
|
|
Разделы
Публикации
Популярные
Новые
|
Главная » Температурная зависимость смещения 1 ... 11 12 13 14 15 16 17 ... 41 от времени, необходимото для .выхода из режима насыщения при и~ъых тах- Приведенныек входу напряжение и ток шума Рш. Приведенное к вжоду напряжение шума определяется как напряжение шума, измеренное на выходе усилителя при закороченном в'ходе и пересчитанное к входу. Приведенный к входу ток шума определяется как ток шума, измеренный на выходе усилителя при разомкнутом входе и пересчитанный к входу (см. рис. 5.34). Вследствие того, что напряжение и ток эквивалентных ге- нераторов шума являются частотно-независимыми, в технических характе1ристи1ках обычно приводится опект1р шумов, отнесенный к полосе частот 1 Гц (см. рис. 5.35). Р а б о ч и й д и ап а з о н н а п р я ж е н и й питания ± Lnn. Интег^ральные ОУ обычно рассчитываются для работы в широком диапазоне напряжений питания. Преимущества такого подхода заключаются в том, что, с одной стороны, обеспечивается нормальная работа ОУ при низком напряжении питания, а с другой - .при высоком напряжении питания усилитель не выходит из с11роя. Минимальное напряжение питания (обычно от ±1 до ±4 В) ограни1ено размахом выходного напряжения, а максимальное (обычно от ±18 до ±22 В)-допустимыми напряжениями и^эо транзисторов. Потребляемая мощность Ро определяется как мощность тюстоянного тока, отбираемая ОУ от источникюв питания при отключенной нагрузке и отсутствии входного сигнала. Она равна произведению полного напряжения питания и+ -на ток покоя ОУ. Изготовители часто приводят не этот параметр, а потребляемый ток, который является током, отбираемым ОУ от источника питания. В связи с тем, что в интегральных ОУ обычно не создаются внутренние точки заземления, пот1ребляемые им токи от источников положительного и отрицательного напряжения при С/вь1х=0 равны. М о щ н о с т ь р а с с е я н и я Рр max определяется как максимально допустимая мощность, кото-
705 Т^С Рис. 5.,16. Зав.иои1М1ос.ть мощности рассеяния от окружающей температуры- рая может быть рассеяна ОУ при наличии входного сигнала и подключенной нагрузке. Как следует из этого определения, в мощность рассеяния Рртах включается также и мощность потребления Ро. Мощность Рр max является функцией окружающей температуры и зависит от диапазона рабочих температур и типа корпуса. Для описания температурной зависимости используются так называемые кривые изменения номинальных параметров, показанные на рис. 5.16. Диапазон рабочих температур Токр - зто такая область температур окр|ужающей среды, в пределах которой гарантируется работа ОУ с сохранением за)Данных в технических характеристиках значений параметрот. На практике стала общепринятой разработка ОУ для одного из трех диапазонов рабочих температур: от -55 до 125; от -20 до 85; от О до ,70° С. В случае необходимости диапазон рабочих температур может быть расширен ц обоих направлениях, если дри этом не превышается допустимый предел мощности рассеяния, а корпус способен .выдержать воздействие повышенных твмпера.тур. 5.4. Задание рабочей точки Задание рабочей точки интегральных ОУ является сложной процедурой, включающей: задание входного тока покоя; компенсацию тока и напряжения смещения; минимизацию температурного дрейфа; задание синфазной составляющей входного напряжения. Построение цепи, обеспечивающей протекание тока покоя, необходимо во всех случаях. Выполнение других операций зависит от конкретных особенностей применения и других факторов. Для описания последовательности операций при задании рабочей точки воспользуемся примерами, приведенными на рис. 5.17. , Считая, i4ITiO /вх см и Ubx см ничтожно малы, цепь смещения можно построить простейшим образом, как показано на рис. 5.17а. В связи е тем, что ток покоя инвертирующего входа протекает через резистор R2, на выходе появляется определенное напряжение ошибки. Однако оба выхода находятся практически под потенциалом земли. При этом синфазная составляющая напряжения равна нулю и выходное напряжение не зависит от Ri. В схеме, показанной на рис. 5.176, выходное напряжение ошибки, которое возникало в предыдущем случае, устранено в результате соединения неинвертирующего (входа с землей через резистор Ra=Ri\\R2, сопротивление которого равно суммарному сопротивлению, измеренному со стороны инвертирующего входа. Если токи Ibx i различны, .то входной ток смещения име- ет конечное значение, что также вызывает появление на выходе напряжения ошибки (рис. 5.17в). Это напряжение можно скомпенсировать при помощи тока внешнего источника (рис. 5.17г) или путем изменения сопротивления Ra (рис. 5.17(3). Если входное .напряжение смещения Ubx см не равно нулю, то необходимо учитывать до1Полнительную составляющую ошибки выходного напряжения (рис. 5.17е). Входное напряжение смещения м.ожно скомпенсировать либо независимо, либо одновременно с входным током смещения. В цепи на рис. 5.17ж ошибка напряжения, обусловленная ненулевым значением Ubx см, уст1раняется тем же внешним источником тока, что и составляющая, обусл.овленная ненулевым значением /вхсм-На рис. 5.17з дан пример независимой компенсации при помощи внешнего источника напряжения. И, наконец, входные ток и на-
ОмВ I -1  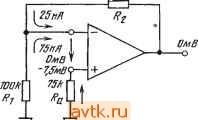 /вот -бмВ X X 
 ± ± -7,5М8 100k
9¥к Ra  -fMB 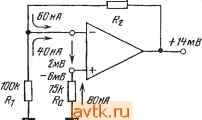 /-ВЛнй 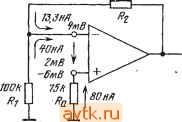 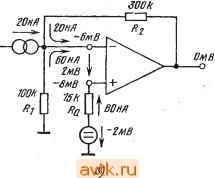 300/! -7SmB юок   <0j 7ВВА
75к яа 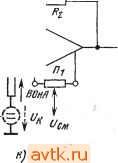 -7,5МВ о ОМ В (твнй 1 300/t 70ВАП 7ВАГ\к 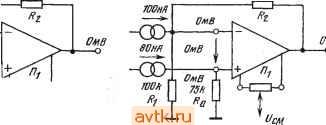 - n) Рис. 5.17. Схемы смещения пряжение смещения .в цепи на рис. 5.17 компенсируются одновременно при помощи одного ннешнего источника напряжения, использованного в цепи, на рис. 5.17з. Если интегральная схема содержит внутренние цепи компенсации напряжения смещения, .необходимость во в.нешних элементах отпадает, а влияние тока смещения мо.жво устранить либо компенсирующим тоном 1и, либо .компенсирующим на.пря>ением Lft, как показано на рис. 5.17к. Внутренние щепи компенсации могут быть использованы также для одновременного устранения влияния входного тока и напряжения смещения (рис. 5.17л). Однако две (составляющие смещения изменяются неавтономно в процессе компенсации. В цепях смещения, изображенных на рис. 5.176-л, синфа.з,ная составляющая входного напряжения отлична от нуля. Это значит, что выходное напряжение зависит от Ri и Ra, которые всегда включают в себя также и сопротивление источника сигнала. С целью устранения влияния синфазной составляющей напряжения в цепь смещения следует щводить дополнительные компенсирующие элементы, например показанные на рис. 5.17л. Чтобы лучше разобраться в цепях смещения, рассмотрим эквивалентную схему рис. 5.18, на основании кОТорюй выходное напря- 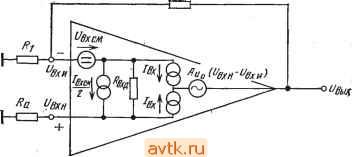 Р;ис. 5/18. Зивилзалентная схема мещения ОУ жение смещения усилителя с обратной связью можно определить следующим образом: f/вых см = -2 (/вх + /вх ом/2)-R (R + RIR (/, - 4 , /2) + + (1 + 2)/вхом ?1. (5.20) Если влияние /вх устранено с помоиЦ)Ю Ra=R\\iR2, то это выражение можно упростить: /вых см ~ R-i. /вхсм + (/?1+/?2)/вхом/1- (5.21) к рассмотренной выше ошибке (выходного напряжения добав-,;яется температурный дрейф выходного напряжения: вых ом = 2 (А /вх/А Т +1, ом/2) -/?а {R -f RIR (Д Д Т- -вх ом/2) + (/?1 + /?2) вх ом/1- (5.22) при наличии Ra=Ri\\R2 выражение (5.22) принимает вид вых см ~ вх сх + iRi + RJu,jR. (5.23) в режиме по постоянному тсжу выходное напряжение ошибки, обуслоЕлениое смещением и дрейфом, .нельзя отличить от усиливаемого сигнала (.от полезного сигнала ). Тем не менее целесообразно провести более тщательное сравнение усиливаемого сигнала и напряжения ошибки путем пересчета последнего к входу усилителя. Дифференцирование такого нормированного обобщенного выражения для напряжений смещения и дрейфа инвертирующего усилителя дает: вх см = -1 (вх + /вх см/2) -f R {Ri -f /?2)/2 (jsx - - /вх см/2) -{R, + R,) ,JR (5.24) и'вх см = - (A /вх/А Т +1 ,J2) + R {R, + R)/R, (Д IJA T- -JBx cm/2) -{R, + R,) u ,JR (5.25) или fsx cm = -Rl /вхсм - (Rl + Rz) Чвх cJRi (5.26) bx cm = - Rl Bx cm - {Rl + R2) bx cu/Ri (5.27) соответственно для случаев, когда имеется или отсутствует Ra- Ri\\R2. Осуществляя аналогичное нормирование для неинвертирующих усилителей, получим: f/вх см = (Rl II R2) (/вх + /вх см/2) (/ - ,J2) + Ub (5.28) вх см = (Rl II R,). (А /вх/А Т +1, , /2) - -R (Д /вх/А r-t, ,/2) + иву, ом, (5.29) f/BxcM = (/?ll/2) /вх см -ff/вхсм. (5.30) И'вх см г (1II а) вх см + вх см- (5.31) Два последних выражения справедливы при /?2. Таким образом, существует много спО'Ообов компенсации напряжения смещения. Выбор способа для коикретного применения определяется двумя факторами: до.пустимым общим напряжением дрейфа и номиналами используемых резисторов. Сравнение выражений (5.22) и (5.23) позволяет установить, что, во-первых, напряжение дрейфа, обусловленное температурной зависимостью входных токов покоя, можно устранить путем введе-.ния Ri-RWR и, во-вторых, всегда целесообразно использовать такую компенсацию. Если :К параметрам дрейфа предъявляются не очень жесткие требования, то .целесообразно применять цепи, приведенные на рис. 5.17ж;, и, в которых одни и те же элементы- выполняют функции компенсации всех составляющих напряжения смещения. Однако в этом случае не обеспеч'ивается С/вхсм=0 и, следовательно, вх см нельзя сделать минимальным. Указанный недостаток можно устранить с помощью цепи на рис. 5Л7к, в которой номпенсация нацряжения и тока смещения осуществляется независимо. Процесс установки нуля в этом случае состоит в заиорачввании зажимов н и и , установки нуля выходного напряжения при помощи потенциометра Пь удалении перемычки между н и и. и компенсации токовой составляющей смещения при помощи /ь или Uu- Для компенсации тока смещения или общего напряжения в усилителях с низкоомньши резисторами можно использовать вспомогательный источник тока, как показано на рис. 5.19а. В преды- 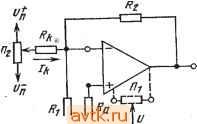 Рмс. 5.19. ]К|01Миен!с.а(ц.ия кмещания при шомощи гасп-омогательного источника тока дущем случае требовалась предварительная компенсация напряжения смещения. Выбирая сопротивление Rh, в несколько тысяч раз превышающее сопротивление RR, можно получить достаточно широкую область компенсации. Например, при . /?ь=2000 (iIIP2), f/+n==15 В и и- =-15 В возможная область компенсации составляет ±7,5 мВ. 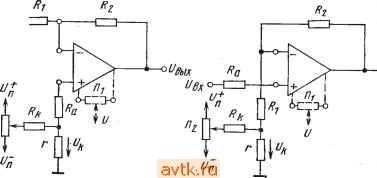 Рис. 5.20. Компенсация смещения при помощи. вспомог.атешьнош источника напряжения MmepTiipiyromHe усилители, в которых используются высокоомные резисторы, требуют очень малых компенсирующих токов. В таких случаях цепь на рис. 5.196 имеет преимущество по сравнению с цепью на рис. 5.19а. На рис. 5.20 показан другой способ установки нуля в таких усилителях, заключающийся в подаче на неинвертирующий вход нобольщого компенсирующего напряжения. Сопротивление Rn следует выбирать таким, чтобы 7?ь/г= 10004-5000 и r<Ra. Если сопротивление источника сигнала постоянно, то суммарное напряжение смещения можно скомпенсировать так, как показано на рис. 5.17лг, но при этом на суммарное напряжение дрейфа будет влиять температурная зависимость томов покоя баз. В этом случае можно использовать устройства, схемы которых показаны на рис. 5.21. В них вспомогательный ток также зависит от температуры, а через Ri не протекает ток покоя. /1г R, 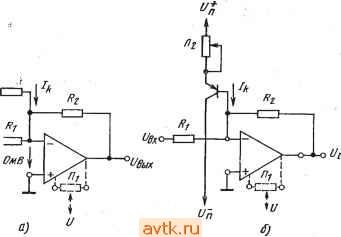 Рис. б.-гл. Компенсация смещения три иомощи ггермозаиисимого вспомогательно- юо ;источн1йка тюка Если необходимо скомпенсировать смещение повторителя или неинвертирующего усилителя, иозникают дополнительные трудности. В обоих вариантах входной сигнал может свободно проходить через источник компенсирующего тока. Это затруднение можно преодолеть путем включения источника напряжения с плавающим потенциалом относительно земли (рис. 5.22а) или использования термозависимо'го источника тока (рис. 5226). Из выражений (5.27) и (5.31) видно, что суммарное напряжение дрейфа усилителей с обратной связью, в которых используются высокоомные резисторы, преимущественно зависит от ibxcm и Может быть уменьшено путем снижения сопротивлений резисторов. Практически приемлемое уменьшение ограничено зна|Чением схем, поскольку при (i?ii?2)ibxсм<Ивхсм значения сопротивлений перестают влиять на дрейф напряжения. Следовательно, сопротивление ех см - ех cмlвx см (5.32) рассматривается как своеобразный параметр, который можно использовать в качестве исходного для определения Ri и R2 из соотношения RAR2~Rbkcm. Ниже будут представлены некоторые выпуекаемые модели усилителей, для которых значения сопротивлений Rbxck приведены в табл. 5.,1. 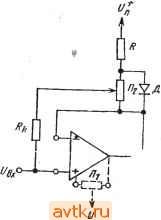 о*-о%  О Уж. 5.32. Примеры жюмпенсациа омещения усиЛктелянповторигеля лря помощи термоэа1В1Ис:и1мОГО !вопомог.ателшого источника тока Таблица 5.1 Тип вх см- Тип вхсм- О (ЛА702 ЦА709С UA709 IIA74IC 11А741 11А725 цА776 6 10 10 30 20 10-- юз UA799C iA799i LM308 LMI08 цА740 LF355 СА3130 200 3-103 6-103 15.103 15-103 100-103 5.5. Частотная коррекция Большинство усилительных устройств, в которых используются интегральные ОУ, можно представить в виде некоторых базовых конфигураций на основе инвертирующего и неинвертирующего усилителей с обратной связью, в которых зависимость коэффициента усиления по напряжению от частоты определяется коэффициентом усиления петли: Г„(5) = ЛЛ5)Р(5) (5.33) [см. выражения (5.6) и (5.7)]. При неблагоприятных условиях такие усилители могут легко возбудиться. Самовоэбуж;дение -можно предотвратить путем выбора коэффициента усиления петли таким образом, чтобы он отвечал требованиям критерия устойчивости, рассмотренным в § 3.2. В простейшем (а потому и наиболее распространенном) случае использования частотно-независимой обратной связи коэффициент усиления петли Tn{s) =Au{s)o отличается от Au{s) только постоянным множителем Ро- Следовательно, построение частотной характеристики для .коэффициента усиления петли практически сводится к изменению передаточной характеристики усилителя. Легко заметить, что первую характеристику можно получить из последней путем ее вертикального смещения на 1/Ро (рис. 5.23). В гл. 6 будет показано, что величина 1/Ро т. е. необходимое смещение по вертикали для неинвертирующих усилителей с обратной связью соответствует Аи , {I+Auq ) Для простых инвертирующих усилителей и (1--2Лир ) для суммир-ующих инвертирующих усилителей. Однако выполнение критерия устойчивости является необходимым, но недостаточным условием приемлемого качества. Усилитель должен удовлетворять ряду дополнительных требований, которые, в свою очередь, накладывают ограничения на частотные характеристики. К ним относятся частота полной мощности и частота, на которой коэффициент усиления петли минимален. Последний параметр представляет собой частоту, на которой значение коэффициента усиления петли еще достаточно для того, чтобы усилитель с обратной связью обеспечивал необходимую чувствительность. Эта частота обозначается символом fs. При большом коэффициенте усиления петли fs значительно превышает предельную частоту разомкнутого усилителя fo, но значительно ниже предельной частоты усилителя с обратной связью fooc (см. рис. 5.23). Обычно интелральный ОУ описывается передаточной функцией, имеющей три полюса. При этом дополнительные фазовые сдвиги можно не учитывать. Задача разработчика состоит в том, учтобы скорректировать амплитудно-частотную характеристику ОУ 60 ¥0
90 20 70 70 70 70 10 ffu Рис. S.23. Типичная вдстомая жараюгеристика 1 ... 11 12 13 14 15 16 17 ... 41 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2004-2025 AVTK.RU. Поддержка сайта: +7 495 7950139 в тональном режиме 271761
Копирование материалов разрешено при условии активной ссылки. |
 Экструзия композитов
Экструзия композитов Угловые шкафы
Угловые шкафы Искусственная кожа
Искусственная кожа Детская кроватка
Детская кроватка Мебель для ванной
Мебель для ванной Выбираем мебель
Выбираем мебель Ткань для мебели
Ткань для мебели Подъемная кровать
Подъемная кровать Шторы для дома
Шторы для дома Поролон
Поролон