

|
|
|
Разделы
Публикации
Популярные
Новые
|
Главная » Квазистационарное поведение динамических моделей 1 ... 4 5 6 7 8 9 10 ... 36 График функции л;1 = ф() имеет вид, изображенный на рис. 2.43. Положив и = ф(2 - ct), мы получаем бегущую волну типа фронтам, перемещающуюся вдоль оси z со скоростью с'>. ЛИТЕРАТУРА [2.1] Nagy J.: Soustavy obycejnych differencialnich rovnic, SNTL, Praha, 1980. [2.2] Степанов В. В. Курс дифференциальных уравнений. - М.: Гостехиздат, 1953. -468 с. [2.3] Матвеев Н. М. Дифференциальные уравнения. - Минск: Высшая школа, 1968. [2.4] Понтрягнн Л. С. Обыкновенные дифференциальные уравнения. - М.: Наука, 1974. 2.5] Kurzweil J.: Obycejne differencialnl rovnice, SNTL, Praha, 1978. 2.61 Hartman P.: Ordinary Differential Equations. J. Wiley, New York, 1964. .2.7] Coddington E. A., Levinson N.: Theory of Ordinary Differential Equations, McGraw-Hill, New York, 1955. Имеется перевод: Коддннгтон Э., Левннсон Н. Теория обыкновенных дифференциальных уравнений.- М.: ИЛ, 1958. [2.8] Арнольд В. И. Обыкновенные дифференциальные уравнения. - М.: Наука, 1975. [2.9] Арнольд В. И. Дополнительные главы теории обыкновенных дифференциальных уравнений.- М.: Наука, 1979. .{2.10] Brunovsky Р.: Рокгоку mat. fyz. astr. 18 (1973), 271. ;2.11 Brunovsky P., Medved M.: Pokroky mat. fyz. astr. 27 (1982) 74. 2.12] Irwin M. C: Smooth Dynamical Systems. Academic Press, London, 1980. 2.13 Boruvka 0.: Zaklady teorie matic. Academia, Praha, 1971. 2.14] Schmidtmayer J.: Maticovy pocet a jeho pouziti v technice. SNTL, Traha, 1967. [2.15 Гантмахер Ф. P. Теория матриц.- M.: Наука, 1966. [2.16] Carr J.: Applications of Centre Manifold Theory. Springer, New York, 1981. [2.17] Marsden J. E., McCracken M.: The Hopf Bifurcation and its Applications. Springer, New York, 1976. Имеется перевод: Марсден Дж., Мак-Кракен М. Бифуркация рождения цикла и ее приложения.-М.: Мир, 1980. 2.18] Шошитайшвили А. Н. Труды семинара им. И. Г. Петровского 1 (1975). 2.19] Abraham R., Robbin J.: Transversal Mappings and Flows. W. A. Benjamin, Inc., New York, 1967. 2.20] Арнольд В. И. Успехи мат. наук 28, 5 (1972), с. 119. 2.21 Богданов Р. И. Труды семинара им. И. Г. Петровского, 2 (1976), с. 23-37. [2.22] Gottschalk W., Hedlund G. А.: Topological Dynamics, AMS Colloquium publications, V. 36, Providence, R. I. 1955. [2.23] looss G.: Bifurcation of Maps and Applications. North-Holland Publ. Сотр., Amsterdam, 1979. [224] Nitecki Z.: Differentiable Dynamics, MIT Press, Cambridge, Massachusetts and London, England, 1971. [Имеется перевод: Ннтецкн 3. Введение в дифференциальную динамику. - М.: Мир, 1975.] [225] Brunovsky Р.: Commun. Math. Univ. Carolinae 11 (1970), 22 (1971). Здесь f(a) = f(6) = 0, т.е. имеются пространственно однородные стационарные состояния и(2, t) = а u(z, /)= b.-Прим. ред. [2.26] Странные аттракторы. Сборник переводов под редакцией Я. Г. Сниая> н Л. П. Шильннкова. - М.: Мир, 1981. [2.27] Оселедец В. И. Труды Московского математического общества 19 (1968), с. 179. [2.28] Былов Б. Ф. н др. Теория показателей Ляпунова и ее приложения, к вопросам устойчивости. - М.: Наука, 1966. [2.29] Немыцкий В. В., Степанов В. В. Качественная теория дифференциальных уравнений.-М.: Гостехиздат, 1949. [2.30] Шильников Л. П. Теория бифуркаций и модель Лореица. Дополнение И в русском переводе [2.17]. ;2,31] Smale S.: Bull. AMS 73 (1967). 747. 2.32] Henry D.: Geometric Theory of Semilinear Parabolic Equations. Lect., Notes in Math. 840. Springer, Berlin, 1981. [2.33] Satttinger D. H.: Group Theoretic Methods in Bifurcation Theory. Lect.. Notes in Math. 762. Springer, Berlin 1979. 2.34] Ruelle D.: Arch. Rat. Mech. An. 51 (1973), 136. 2.35] Sikorski R.: Rachunek rozniczkowy i calkowy. PWN. Warszawa, 1969.. 2.36J Jarnik v.: Differencialni poeet II. Academia, Praha, 1984. [2.37] Nirenberg L.: Topics in Nonlinear Functional Analysis, Courant Inst, of Math. Sci., New York, 1973. [Имеется перевод: Ниреиберг Л. Лекции по иелииейиому функциональному анализу. - М.: Мир, 1977.] [2.38] Колмогоров А. Н., Фомин С. В. Элементы теории функций и функционального анализа. - М.: Наука, 1968. - 496 с. [2.39] Kato Т.: Perturbed Linear Operators, Springer, Berlin. 1980. [Имеется, перевод предыдущего издания: Като Т. Теория возмущений линейных, операторов.-М.: Мир. 1972.] [2.40] Taylor А. Е.: Introduction to Functional Analysis. J. Wiley, New York... 1958. ;2.41] КПг A.: Aplikace matematiky 28 (1983). 335. 2.42] Guckenheimer J.: Multiple Bifurcation Problems of Codimension Two.. Preprint University of California, Santa Cruz, 1979. [2.43] Col et P., Eckman J. P.: Iterated Maps on the Interval as Dynamical Systems. Birkhauser, Boston, 1980. ;2.44l Nagy J.: Vybranfe partie z modern! matematiky. SNTL. Praha. 1976.. 2.45] Спивак M. Математический анализ иа многообразиях. - М.: Мир,. 1968. [2.46] Nagy J.: Stabilita feSenf obyeejnych differencialnfch rovnic SNTL Praha, 1980. [2.47] Шильииков Л. П. Математический сборник, т. 81(123), № 1, с. 92.. Глава 3 ВЕТВЛЕНИЕ СОСТОЯНИЙ РАВНОВЕСИЯ НА ДИАГРАММЕ РЕШЕНИЙ в предыдущей главе мы сделали попытку познакомить читателя с основными понятиями теории динамических систем, -а также со связанными с ними явлениями бифуркаций. В этой главе мы рассмотрим методы, позволяющие исследовать поведение стационарных решений систем дифференциальных уравнений в зависимости от параметра в окрестности точек ветвления. Такого рода анализ тесно связан с построением так называемой диаграммы решений, которое приходится проводить численно. При этом сами численные алгоритмы рассматриваются в гл. 5. Р1 3.1. ДИАГРАММА СТАЦИОНАРНЫХ РЕШЕНИЙ Анализ стационарных решений (состояний равновесия) одно-параметрических семейств дифференциальных уравнений приводит к необходимости исследования множества решений следующей системы: fiixu Х2, х„, а) = 0, /2(1, Х2, Хп, а) = 0, J f,j(xi, Х2, ..., х„, а) = 0. В дальнейшем мы будем предполагать, что функции fi{X], ... ..., Xrt, а), j = 1, 2, ..., п, достаточно гладкие, а - вещественный параметр, а xi, Хг, Хп - неизвестные. Систему (3.1.1) .можно кратко записать в виде f(x, а) = 0. , (3.1.2) Множество всех решений системы (3.1.1) обозначим S (f): S(f) = {(x, a)eR XR, f(x, а) = 0}. (3.1.3> Множество S (f) обычно представляет собой объединение нескольких кривых в R * , хотя может включать в себя и отдельные изолированные точки (рис. 3.1). При п > 1 множество S (f) удобно изображать на двумерной плоскости. Такое двумерное представление множества S(f) мы будем называть диаграммой стационарных решений. При этом мы обыкновенно проектируем множество S.(f) на выбранную* 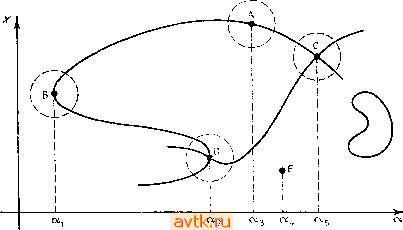 Рис. 3.1. Множество S (f). плоскость Xi - а. При проектировании может оказаться, что на двумерной картинке имеет место пересечение кривых, хотя на самом деле в R * эти кривые не пересекаются. Точки фактического и кажущегося пересечения кривых из: S (f) на диаграмме решений мы можем различать способом, показанным на рис. 3.2а,Ь. В дальнейшем последовательных различий между множеством S (f) и диаграммой стационарных, решений проводиться не будет; из контекста всегда будет ясно, какой из этих объектов имеется в виду. Дадим теперь формальную классификацию точек множества S (f), начав со случая п==1. В этом случае множество решений S(f) можно изобразить на плоскости х - а (рис. 3.1). 1. Предположим, что {Xq, Oq) е S(/) и пусть {хо, ао)ФО. (3.1.4) Тогда согласно теореме о неявных функциях существуют е > О и единственная функция g{a) {g{ao) = Xo), такая что f{g{a),a) = 0 для всех ае(ао -е, о + е). При этом множество S(f) в окрестности точки {хо,ао) задается графиком функции g. Точку {xq, ao)eS(f), для которой выполнено условие (3.1.4), мы называем регулярной точкой. Как видно из рисунка, большинство точек кривой принадлежат именно к этому типу.   Рис. 3.2. Точки пересечения на диаграмме решений. 2. Пусть теперь в точке {xq, Oq) е S (f) {хо, ао) = 0. (3.1.5) В данном случае мы не можем воспользоваться теоремой о неявных функциях. Однако если {хо, Оо) Ф О, (3.1.6) то, поменяв x и а местами, можно построить в окрестности точки (а'о, ао) функциональную зависимость а = а(л;), ао = = ао{хо). Из соотношения (3.1.5) следует, что а'(д^о) = 0. На рис. 3.1 такой точкой является точка В. Точку {xq, ao)eS(f), в которой одновременно выполняются условия (3.1.5) и (3.1.6), а производная da/dx меняет знак , мы называем (простой) точкой поворота. 1® При переходе а через значение ао происходит бифуркация: появляется или исчезает пара решений. Значение ао мы называем бифуркационным значением параметра. 3. Если в точке (xq, Oq) S (f) {хо, ао) = -(о, ао) = 0. (3.1.7) то точка (а'о, ао) называется сингулярной точкой множества S(f). Обозначим через a{f) множество всех точек поворота и Чтобы производная а'{х) меняла знак в этой точке, достаточно выпол-нения условия {df/dx) (хо, ао) ¥= 0. сингулярных точек множества S (f). Точки множества а(/) мы? называем критическими точками S(f). Критические точки разбивают множество S(/) на ветви стационарных реш.ений\ Каждая ветвь состоит из регулярных точек и определяет однозначную зависимость х{а). Во всякой точке поворота заканчиваются две ветви решения.. В особой точке могут оканчиваться несколько ветвей (в точке С на рис. 3.1 -четыре). Замечание. Множество S(f) в общем случае состоит из нескольких кусков - компонент связности (на рис. 3.1 их три)- Может случиться, что какая-либо компонента представляет собой замкнутую кривую, не имеющую самопересечений.. Такую компоненту множества S(f) мы будем называть изолой. Изола состоит из двух (или более) ветвей, разделенных точками поворота. 3.2. ВЕТВЛЕНИЕ В ТОЧКАХ БИФУРКАЦИИ. ОДНОМЕРНЫЙ СЛУЧАЙ Рассмотрим уравнение fix, а) = 0, xR. (3.2.1> Далее, пусть (д;*, а') е S(f) (т. е. /{х', а) = 0) и {х\ а) = -{х', а-) = 0. (3.2.2> Предположим также, что по крайней мере одна частная производная второго порядка от функции / в точке (х*, а*) отлична от нуля. Разложим функцию f с помощью формулы Тейлора в окрестности точки {х*,а*). Учитывая, что f{x*,a*) = 0, а также соотношения (3.2.2), получаем fix, а) = [А(х-хУ-\-2В(х-х')(а-а') + , +С{а~аУ] + о[{х-хУ + {а-аУ] = 0, (3.2.3> где л df{x*,a*) d df {х', а*) df (х*, а*) дХ , о- QQ . 1>- Разделим соотношение (3.2.3) на {а - а*у или {x - x*Y и осуществим предельный переход {х,а){х', а), {х,а) Иначе говоря, ветви - компоненты связности множества S{f)\a(f).- Прим. ред. S(f), см. [3.1]. При этом мы получим уравнение dx da + С = 0, или (3.2.4) (3.2.6) Здесь dx/da - угловой коэффициент касательной к дуге, проходящей через точку {х*,а*), если мы рассматриваем х как функцию а, или же da/dx - угловой коэффициент касательной, если мы считаем а функцией от х.   аг а. а. Рис. 3.3. Поведение решений в окрестности критической точки. Рассмотрим теперь уравнения (3.2.4) и (3.2.5). Случай I. Л 0. Тогда решение уравнения (3.2.4) имеет вид fdx\ ... ~В±л/В^~АС Обозначим D = - АС. Если D < О, то точка (д^,а*) является изолированной точкой множества S(f) (из нее не выходит ни одна кривая). Если же D > О, то в этом случае уравнение (3.2.4) имеет два вещественных решения - это означает, что в окрестности точки {х*, а*) множество S (f) состоит из двух пересекающихся дуг. Или: в точке {х*, а*) сходятся четыре ветви стационарных решений (см. рис. 3.3а). Случай II. Л=0, СфО. Тогда уравнение (3.2.5) имеет два решения / rfa \ da\ 2В в этом случае множество S (f) в окрестности точки {х*,а*) также состоит из двух пересекающихся дуг (рис. 3.36). Одна из них имеет в этой точке вертикальную касательную: {х*,а*) - точка поворота для этой ветви. Такой случай отвечает бифуркации типа вилка и обычно встречается в системах, обладающих симметрией. 3.3. ВЕТВЛЕНИЕ В ТОЧКАХ БИФУРКАЦИИ. МНОГОМЕРНЫЙ СЛУЧАЙ В этом параграфе мы вновь обратимся к анализу системы (3.1.1), см. [3.2]. Пусть (х*, a)eS(f), т. е. (3.3.1) Введем обозначения
(3.3.2) (3.3.3) При этом все частные производные в формулах (3.3.2) и (3.3.3) вычисляются в точке (х*,а*). Случай 1. DetJ=iO. Если detJ=iO, то к системе (3.1.1) можно применить теорему о неявных функциях, согласно которой для всех а, взятых в некоторой окрестности U(a*), существует однозначная зависимость X = X (а), f(x(a), а)0 для всех aU{a*). Таким образом, через точку (х*, а*) проходит только одна ветвь решений системы (3.1.1). Точку (х*, а*), для которой выполнено условие detJO, (3.3.4) мы будем называть регулярной точкой. Случай П. Det J==0 и ранг расширенной матрицы J равен п: rank(J) = n. В этом случае, заменив^ один из столбцов матрицы J последним столбцом матрицы J, можно добиться того, чтобы полученная матрица имела ранг п. Для удобства записи предположим, что заменен первый столбец матрицы J (этого всегда можно добиться с помощью подходящей нумерации столбцов), причем полученная матрица Г dfi dfi df, dfn dfn (3.3.5) дх2дхп - имеет ранг п, т. е. detJaTO. Тогда, аналогично случаю I, к системе (3.1.1) можно вновь применить теорему о неявных функциях, с той лишь разницей, что роль а играет теперь переменная xi. Таким образом, можно утверждать, что существуют функции Xj = Xjixi), j = 2, п, и a = a{xi), определенные в некоторой окрестности U (л:*), такие, что х^ (х*) = х], 1 = 2, п, а (х') = а*, f{xi, Xiixi), x{xi), а(д;,)) = 0 для всех XjeU(jCi). Можно показать, что (3.3.6) Тогда, если da/dxj < О, функция a(.ti) имеет в точке х\ максимум - это означает, что при а > а* пара стационарных решений исчезает. Если же da/dx О, то функция a{xi) в точке имеет минимум и, значит, прн а > а* возникает пара стационарных решений. Такую точку {х*, а*) мы будем называть точкой поворота. Если ранг матрицы J(x*, а*) меньше п, то точку (х*, а*) называют сингулярной точкой множества S(f). Случай III. rank(J(x*,a*)) = n-1. Предположим, что rank(J) = п- 1 (этим случаем мы и ограничимся). Тогда нз матрицы J можно выбрать матрицу Ji порядка п-1, определитель которой отличен от нуля. Для упрощения записи будем предполагать, что матрица Ji получается из матрицы J вычеркиванием первого столбца н последней строки. Таким образом, dfr df, дхо дХп L дХ2 дХп (3.3.7) detj,(x*, а)фО. (3.3.8) Рассмотрим первые п-1 уравнений системы (3.1.1). Условие (3.3.8) позволяет применить к этой системе теорему о неявной функции. Из нее следует, что существуют функции Xi = (fi{x а), 1 = 2, 3, и, (3.3.9) определенные в некоторой окрестности U точки {х\, а), такие, что для (Ху, а) е и имеют место условия * = К' *) = 2, 3, ..., и и fjixi, ф2(1. а). а), а)0, (3.3.10) где / = 1, 2, ..., и - 1. Подставим функции (3.3.9) в последнее уравнение системы (3.1.1), введя при этом обозначение F{xi, a) = f{xi, (p2{xi, а), фз(д;1, а), (pixi, а), а). (3.3.11а) Мы получим Fixi, а) = 0. (3.3.11b) Теперь можно исследовать уравнение (3.3.11) с помощью методов, описанных в § 3.2. Таким образом, нам удалось (исходя из заданных предположений о ранге матрицы J) свести {n-j- 1)-мерную задачу к двумерной. Можно убедиться, что в рассматриваемом случае, когда rank(J)= п- 1, ЖГ *) = Ж-К' *) = 0- (3.3.12) Таким образом, сингулярной точке (х*,а*) множества S{f) в R отвечает сингулярная точка множества S{F) в Rl Из уравнения (д:!, а) = 0 (3.3.11) можно так же, как это сделано в § 3.2, найти угловые коэффициенты касательных к ветвям S {F) (т. е. вычислить значения в точке {х\, а)). Затем с помощью формулы da--Ж + Ж' /-2. 3, л (cS.cS.lcS) можно найти направление ветвей S (f), проходящих через точку (х*,а*) в R +. Это есть итог наших вычислений. 1 ... 4 5 6 7 8 9 10 ... 36 |
|
© 2004-2026 AVTK.RU. Поддержка сайта: +7 495 7950139 в тональном режиме 271761
Копирование материалов разрешено при условии активной ссылки. |
 Экструзия композитов
Экструзия композитов Угловые шкафы
Угловые шкафы Искусственная кожа
Искусственная кожа Детская кроватка
Детская кроватка Мебель для ванной
Мебель для ванной Выбираем мебель
Выбираем мебель Ткань для мебели
Ткань для мебели Подъемная кровать
Подъемная кровать Шторы для дома
Шторы для дома Поролон
Поролон