

|
|
|
Разделы
Публикации
Популярные
Новые
|
Главная » Квазистационарное поведение динамических моделей 1 2 3 4 5 6 7 ... 36 1Г  Рис. 2.23. Бифуркац). удвоения периода. параметра а, располагающихся по обе стороны бифуркационного значения а*. На рис. 2.23 схематически изображена ситуация, когда первоначально устойчивая замкнутая траектория уц при переходе а через а* становится неустойчивой и от нее ответвляется замкнутая траектория угг, которая замыкается после двойного обхода вокруг траектории yir. Новая траектория имеет почти такую же амплитуду , но приблизительно двойной период (асимптотически, при а-а*, точно двойной период) - отсюда и название бифуркации. (HI). Возникновение инвариантного тора Ход событий для этой бифуркации изображен на рис. 2.24. В данном случае от замкнутой траектории, которая становится неустойчивой при изменении параметра, отделяется тор, заполненный траекториями системы (2.3.1). Дальнейшее разбухание тора можно сравнить с накачкой автомобильной камеры. (IV). Бифуркации с потерей симметрии Предположим, что система (2.3.1) обладает некоторой симметрией g (см. п. 2.2.3), например g представляет собой симметрию относительно плоскости р. Предположим, далее, что замкнутая траектория, которая при а < а* расщепляется на две замкнутые траектории. Поскольку при этой бифуркации возникает или исчезает пара замкнутых траекторий, ее называют иногда бифуркацией возникновения или исчезновения пары замкнутых траекторий. (и). Бифуркация удвоения периода. Этот тип бифуркации изображен на рис. 2.23. Здесь существует первоначальная замкнутая траектория при значениях существует замкнутая траектория уо, лежащая в плоскости Р (g(Vo) = Vo)- Такая траектория при изменении а обычно пре-  . < Об  0<. = сс  сс> ос* Рис. 2.24. Возникновение инвариантного тора.   оь >сх7 Рис. 2.25. Бифуркация с потерей симметрии. терпевает следующую бифуркацию. Одновременно с потерей устойчивости от нее ответвляются две устойчивые траектории VI и 72, взаимно симметричные относительно плоскости р (см. рис. 2.25). Возникшие устойчивые траектории уже не яв- ляются g-симметричными (т. е. g(yi)¥=yi, i = 1, 2); тем самым при изменении а имеет место потеря симметрии устойчивых траекторий - отсюда и название бифуркации. № 2.3.2. Отображение Пуанкаре Пусть у - замкнутая траектория системы x = f(x), xeR . (2.3.2) Выберем точку хо е у и проведем через нее сечение, представляющее собой достаточно малую часть гиперплоскости, которая 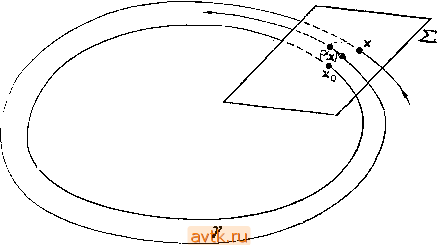 Рис. 2.26. Отображение Пуанкаре. трансверсально (под ненулевым углом) пересекает траекторию Y в точке Хо (см. рис. 2.26). Траектории системы (2.3.2), близкие к замкнутой траектории у, задают отображение Р сечения S на себя следующим образом. Возьмем точку xeS. Через эту точку проходит траектория v(x). Обозначим через Р(х) первую точку пересечения траектории v(x) с сечением S, которая следует после х. Тем самым мы определили отображение Р:2-*2, которое называется отображением Пуанкаре, соответствующим замкнутой траектории у. ft раз Если теперь для всякой точки хе2, достаточно близкой к неподвижной точке Хо, имеет место формула lim Р*(х)= lim Xft+, = Xo, ft- oo ft- oo то Хо есть устойчивая неподвижная точка отображения Р, а замкнутая траектория у, которая соответствует точке хо, является устойчивой траекторией. (Это утверждение нуждается в некоторых уточнениях.- Ped) Устойчивость неподвижной точки хо отображения Р определяется собственными числами матрицы Якоби Р'(хо)>, если абсолютные значения всех собственных чисел этой матрицы меньще 1, то хо - устойчивая неподвижная точка. При этом собственные числа оказываются равными мультипликаторам соответствующего периодического рещения (см. п. 2.3.5). 3) Пусть существует точка yi е 2, такая что (У1) = У2 и Р(у2) = у, и, следовательно, Р2(у,) = у, и Р2(У2) = У2. Тогда траектория у =y{yi) замыкается лищь после двух обходов вокруг у (см. рис. 2.27). Итак, неподвижным точкам второй (к-и) итерации отображения Пуанкаре соответствуют замкнутые траектории системы (2.3.2), которые замыкаются после двух (соответственно, после k) обходов вокруг траектории у. *) Матрица возникает после выбора на S некоторых координат. Ее собственные числа, конечно, не зависят от этого выбора. - Яр лс. ред. Свойства введенного таким способом отображения Р качественно определяют поведение траектории системы (2.3.2) вблизи замкнутой траектории у. В частности: 1) Пусть точка хо является неподвижной точкой отображения Р, т. е. Р(хо) = Хо. Тогда траектория v(xo) замкнута. Итак: неподвижным точкам отображения Р соответствуют замкнутые траектории системы (2.3.2) (лежащие вблизи траектории у). 2) Пусть xi е 2. С помощью отображения Р определим последовательность точек {Xft}r=i, Xft е следующим образом: Х2 = Р(Х,), ХЗ = Р(Х2) = Р(Р(Х,)) = РЧХ,), Xft+,=P*(X,), где символом Р*(х) обозначается k-я итерация отображения Р, т е. Р* = РоРо ... оР. 4) Если вокруг замкнутой траектории у существует инвариантный тор (см. рис. 2.28), то сечение 2 пересекает этот тор по некоторой замкнутой кривой - окружности К. Эта кривая К. переводится в себя отображением Пуанкаре Р: для всякой точки хе/( мы имеем Я(х)е/(, или же Р(К)=К. Итак, инвариантной окружности отображения Пуанкаре соответствует инвариантный тор системы (2.3.2).  Рис. 2.27. Замкнутая двухобходная траектория. С помощью отображения Пуанкаре проблему бифуркации замкнутой траектории системы можно свести к проблеме бифуркации неподвижной точки этого отображения. Сравнивая п.п. 2.3.1 и 2.3.2, получаем: 1. Рождению или исчезновению пары замкнутых траекторий соответствует рождение или исчезновение пары неподвижных точек отображения Пуанкаре. 2. Бифуркации удвоения периода соответствует бифуркация неподвижной точки Хо отображения Р, при которой от Хо ответвляется пара неподвижных точек уь уг второй итерации отображения Р. Заметим, что хо - также неподвижная точка отображения Р^. 3. Возникновению инвариантного тора Р около замкнутой траектории у соответствует бифуркация неподвижной точки хо отображения Р, при которой от точки хо ответвляется инвариантная окружность (замкнутая инвариантная кривая) отображения Р. 4. Бифуркации с потерей симметрии соответствует бифуркация неподвижной точки отображения Пуанкаре, при которой от этой точки ответвляются две другие неподвижные точки отображения Пуанкаре. Замечание. До сих пор мы определили отображение Пуанкаре на сечении 2, которое было достаточно мало \ т. е. мы рассматривали траектории системы, близкие к исследуемой замкнутой траектории. Отображение Пуанкаре можно строить 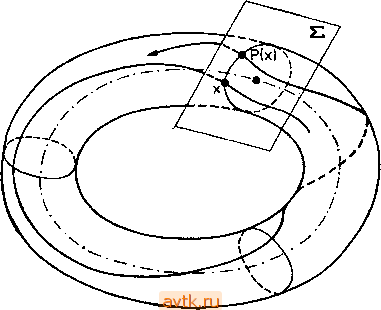 Рис. 2.28. Инвариантный тор Т^. и в более общей ситуации, когда исследуется глобальное поведение системы. В этом случае в качестве сечения 2 мы выбираем обычно всю гиперплоскость или ее часть, находящуюся в изучаемой области фазового пространства (см. п. 5.9.2). 2.3.3. Орбитальная устойчивость решения Понятие устойчивости решения имеет в теории бифуркаций основополагающее значение. Существует множество разных определений устойчивости, наиболее известными среди которых являются устойчивость по Ляпунову и орбитальная устойчивость. Для стационарных решений устойчивость по Ляпунову и орбитальная устойчивость означают одно и то же. Для нас важно более подробно познакомиться с понятием орбитальной В частности, предполагалось, что изучаемая траектория у пересекает 2 только в одной точке. - Прим. ред. устойчивости решений, и в частности, орбитальной устойчивости периодических решений. Рассмотрим систему дифференциальных уравнений i = f(x), xsR (2.3.3) и пусть q)jj(0-се фазовый поток. Пусть x{t)=<f{t) - решение уравнения (2.3.3), а \{хо)-траектория этого решения. Прежде чем давать определения, введем некоторые обозначения.  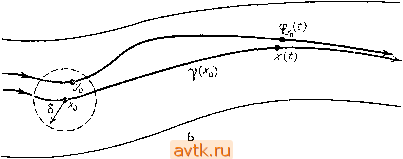 Рис. 2.29. а) Орбитальная устойчивость. Ь) Асимптотическая орбитальная устойчивость. Расстояние между точками х, у е R будем обозначать р(х, у). Если MczR - некоторое подмножество и а е R , то расстояние точки а от множества М определяется формулой р (а, М) = inf р (а, х). Решение x{t) = <f{t) системы (2.3.3) мы называем орби-тально устойчивым, если для всякого е > О существует б > О, такое что верно следующее утверждение: если р(у(хо),уо)< б. то p(y(Xo), q>y(t))<e при всех > 0. Или, более наглядно: траектории, которые начинаются вблизи траектории у(хо)у не слишком отдаляются от нее при любых > О (см. рис. 2.29а). Решение фjj(0 называется асимптотически орбитально устойчивым, если оно орбитально устойчиво и, кроме того, выполняется соотношение lim p(y(xo), <Ру.(0) = 0. Мы будем говорить также об орбитальной устойчивости траекторий. Итак, если решение ф^ (t) асимптотически орбитально устойчиво, то всякая траектория системы (2.3.3), начальная точка которой лежит достаточно близко к траектории у(о)> неограниченно приближается к этой траектории при -v-f-oo (см. рис. 2.29fe). Замечание. Замкнутую асимптотически орбитально устойчивую траекторию мы называем устойчивым предельным циклом. 2.3.4. Элементы теории Флоке Напомним теперь некоторые факты, касающиеся линейных неавтономных систем с периодической правой частью (с периодическими коэффициентами). Итак, рассмотрим систему х = А(Ох, xeR , (2.3.4) где матрица A{t) есть непрерывная периодическая функция переменной t, т. е. для нее выполнено соотношение А(4-Г) = А(0, (2.3.5) где Г > О- период. По определению регулярная (невырожденная) матрица U() представляет собой фундаментальную матрицу системы дифференциальных уравнений (2.3.4), если выполнено условие и(о = А(ои(0. в дальнейшем мы будем рассматривать только стандартные фундаментальные матрицы, для которых U(0)= i. Теорема Флоке утверждает следующее. Стандартная фундаментальная матрица системы (2.3.4) имеет вид li(t) = P(t)e% (2.3.6) где, очевидно, Матрица называется матрицей монодромии. Собственные числа матрицы монодромии называются мультипликаторами системы (2.3.4). Если система x = \(t)\ имеет периодическое решение ij)(/, Хо) с периодом Т, то (Т, Хо) = Хо, т. е. U(7)xo = Xo. (2.3.9) Из формулы (2.3.9) вытекает, что матрица монодромии имеет в этом случае собственное число, равное+1. Система (2.3.4) обладает периодическим решением с периодом Т в том {и только в том) случае, если матрица монодромии имеет собственное число, равное -f-1. Обратимся теперь к вопросу об устойчивости нулевого решения системы (2.3.4). Критерий его устойчивости формулируется с помощью мультипликаторов. Критерий устойчивости нулевого решения Пусть рь р2, р„-мультипликаторы системы (2.3.4). Если р<1, 1=1, 2, п, то нулевое решение системы (2.3.4) является устойчивым по Ляпунову\ Если же р,<;1, 1, 2, п, то нулевое решение данной системы является асимптотически устойчивым, т. е. для любого решения x{t) имеет место соотношение lim х(/) = 0. 2.3.5. Уравнения в вариациях Рассмотрим снова автономную систему x = f(x), xeR . (2.3.10) Это верно, если среди чисел р, нет совпадающих. - Ярил , ред. 4 М. Холодниок и др. где R - постоянная матрица и P(i)-регулярная периодическая матрица с периодом Т, для которой выполняется условие Р(0)= I, и следовательно, 9{kT)= I при kZ. С помощью фундаментальной матрицы (2.3.6) общее решение системы (2.3.4) можно представить в виде {t, x) = P{t)e*-x, (2.3.7) {0, х) = х. V{T) = 9(T)e = e (2.3.8) Пусть p(t) - решение уравнения (2.3.10), т. е. P(0 = f(P(0). Обозначим через х() близкое к р() решение уравнения (2.3.10). Положим X() = р(t) + z{t) и напишем z(0 = f(P(0 + z(0)-t(P(0). (2.3.11) Оставив в правой части (2.3.11) лишь первый (линейный) член формулы Тейлора, мы получаем для функции z(t) л дифференциальное (неавтономное) уравнение вида z(0 = -§(P(0)-z(0. (2.3.12) Это уравнение называется уравнением в вариациях для решения p(t) системы (2.3.10) или линеаризацией системы (2.3.10) на решении р(). Замечание. Если р() является стационарным решением (т. е. его траектория \р = {хо} представляет собой положение равновесия), то уравнение в вариациях имеет вид z(0 = -(Xo)-z(0, т. е. представляет собой систему с постоянными коэффициентами. Важным для иас является случай, когда р() есть периодическое решение системы (2.3.10). Тогда соответствующее уравнение в вариациях (2.3.12) имеет периодическую матрицу A{t) = -{p{t)), и к нему можно применить теорему Флоке. Мультипликаторы уравнения в вариациях мы называем мультипликаторами периодического решения p{t). Отметим следующий важный факт: один из мультипликаторов периодического решения всегда равен -{-1. (При этом остальные мультипликаторы отвечают за орбитальную устойчивость решения p{t).) Чтобы это доказать, необходимо, в соответствии с п. 2.3.4, установить, что при периодическом р() уравнение в вариациях (2.3.12) всегда имеет периодическое решение. Итак, пусть P(t) = f{p(t)) и р(--Г) = p(i;). Дифференцируя обе части этого тождества, мы приходим к соотношению 4?-1-(р ))Р(о. 1 2 3 4 5 6 7 ... 36 |
|
© 2004-2026 AVTK.RU. Поддержка сайта: +7 495 7950139 в тональном режиме 271761
Копирование материалов разрешено при условии активной ссылки. |
 Экструзия композитов
Экструзия композитов Угловые шкафы
Угловые шкафы Искусственная кожа
Искусственная кожа Детская кроватка
Детская кроватка Мебель для ванной
Мебель для ванной Выбираем мебель
Выбираем мебель Ткань для мебели
Ткань для мебели Подъемная кровать
Подъемная кровать Шторы для дома
Шторы для дома Поролон
Поролон