

|
|
|
Разделы
Публикации
Популярные
Новые
|
Главная » Квазистационарное поведение динамических моделей 1 ... 27 28 29 30 31 32 33 ... 36 aril aria dL a/2 dFi dFi aril atia dL (6.2.33) используем вариационные переменные pxi, pyi, определяемые соотношениями (6.1.26) - (6.1.28), a также переменные PxL = dx/dL, Py[ = dyldL, (6.2.34) для которых нетрудно получить следующие уравнения в вариациях: pU+(p-.+%p..)+-.y)= * с начальными условиями PxL (0) = PxL (0) = PyL (0) = PyL (0) = 0. (6.2.36) втором -имела место противоположная ситуация. В первом случае мы решаем уравнения (6.2.9), (6.2.10) при фиксированном (предсказанном) значении параметра а; во втором случае-при фиксированном (предсказанном) значении Уо = у{0), а параметр а считается неизвестным. Блок-схему предложенного алгоритма продолжения типа предиктор-корректор читатель легко может построить самостоятельно. 6.2.3.2. Алгоритм, основанный на методе стрельбы Идею этого метода мы теперь продемонстрируем на примере задачи (6.1.1), (6.1.2) с граничными условиями (6.1.4). Зададим снова два недостающих начальных условия в точке г = О (см. (6.1.24)): x(0)=Tii, г/(0) =112. Интегрируя уравнения (6.1.1), (6.1.2) с начальными условиями (6.1.4а), (6.1.24) при некотором значении параметра L, мы должны получить в точке z= 1 Л (ill. гь, L) = xil, 1\, L) = 0, Fini, T2, L) = yil, r\, L) = 0. (6.2.32) Таким образом, у нас имеются два уравнения относительно трех неизвестных tii, ti2, L. Для нахождения соответствующей кривой в пространстве {ц1,х\2,Ц мы можем использовать алгоритм DERPAR, описанный в § 5.2. Для вычисления матрицы Якоби г dFi dFi dF, -,
(6.2.39) где квадратные скобки означают целую часть заключенного в них отношения. Если теперь взять все известные ветви элементарных решений, то общее число различных решений для Частные производные в уравнении (6.2.33) задаются формулами (6.1.29), а также соотношениями f = P;.(l)- (6-2.37) Таким образом, мы имеем все необходимое для использования алгоритма продолжения DERPAR (см. п. 5.2.3): можем вычислить функции Fl и Fi по формулам (6.2.32), а также матрицу Якоби (6.2.33). Для одного такого вычисления нам необходимо решить задачу Коши для восьми дифференциальных уравнений второго порядка (6.1.1), (6.1.2), (6.1.27) и (6.2.35), т. е. для системы 16-го порядка. В случае ГУ1 алгоритм изменяется в соответствии с формулами (6.1.30), (6.1.31), (6.1.32); при этом частные производные, входящие в матрицу Якоби (6.2.33), имеют вид flF ЯР ЯР (6-2.38) = P l(l), -QPyiil), = P,t(l). Приведенный подход, основанный на методе стрельбы и вариационных дифференциальных уравнениях, называется в литературе методом GPM [6.8, 6.13, 6.14]. Диаграмма решений, найденная с помощью метода стрельбы и алгоритма продолжения DERPAR для задачи 11 в случае ГУ2, представлена на рис. 6.3 [6.15]. Здесь же приведены решения, полученные с помощью суммирования (профилей) решений (см. формулу (4.3.17)). Для некоторых ветвей указана устойчивость соответствующих решений. Из рисунка видно, что при больших L существует значительное число различных стационарных решений. Попробуем оценить это число. Рассмотрим ветвь элементарных решений, т. е. решений, которые не могут быть получены путем сложения решений с меньшими L. Пусть такая ветвь существует при (L,-, Li-fAL;). Если мы выберем максимально широкие промежутки существования, то тогда Li и Li -f AL; представляют собой координаты точек бифуркации. Фиксируем теперь длину L и исследуем, сколько различных решений, полученных сложением из решений этой ветви, будет существовать для такого L. Это число равняется разности ДЛИНЫ L будет равно (6.2.40) где единица представляет собой (при всех L) существующее тривиальное решение х = Л, у^В/А. Эти рассуждения остаются справедливыми для любых систем типа реакция-диффузия с граничными условиями типа ГУ2. Если нам известны не 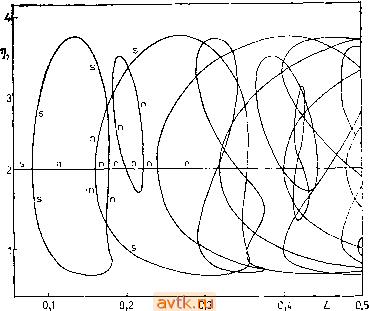 Рис. 6.3. Диаграмма стационарных решений для задачи 11 при ГУ2, А = 2, iS = 4,6, = 0,0016, Dy = 0,008, т), =л:(0); s - устойчивые, п ~ неустойчивые решения. все ветви элементарных решений, то тогда выражение (6.2.40) дает нижнюю оценку числа решений для данного L. Так, при L = 1 на основании рис. 6.3 мы находим, что существует минимум 35 стационарных решений задачи 11 для случая ГУ2 (см. табл. 6.8 с учетом того, что существуют еще тривиальные решения задачи (при любых L)). Пример диаграммы стационарных решений для задачи И в случае ГУ1 представлен иа рис. 6.4, а более полную картину решений наряду с профилями x{z), y(z) читатель может найти в [6.15]. У некоторых ветвей на рис. 6.4 указан характер их Таблица 6.8. Число Ni стационарных решений задачи 11 для случая ГУ2 (Z, = 1), полученных М,-кратным сложением элементарных решений при L = Z.,., Л = 2, iS = 4,6, Dx = 0,0016, Dy = 0,008.
устойчивости. Отметим также, что операция сложения решений в случае ГУ1 оказывается невозможной. 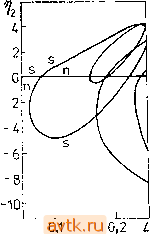 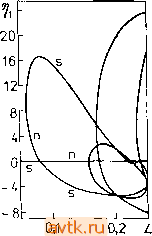 Рис. 6.4. Диаграмма решений для задачи ,11 при ГУ1, А = 2, В = 4,6, D = = 0,0016, Оу = 0,008, r\i = x(Q), г\2 = у'(0); s - устойчивые, п -неустойчивые решения. Часть диаграммы решений для задачи 12 в случае ГУ2, содержащая только элементарные решения, представлена на рис. 6.5. При выбранных параметрах задача имеет три тривиальных решения (они указаны в описании к рисунку, так что читатель может сравнить эти данные с данными рис. 5.6b и 5.20е). Точно так же, как и в случае рис. 6.3, мы можем под- считать число решений при больших L, полученных путем сложения элементарных решений. Диаграммы решений с использованием условий типа ГУ1 представлены на рис. 6.6 для случая граничных условий, определяемых тривиальным решением № 3, указанным в описании к рис. 6.5. На рис. 6.7 изображена диаграмма решений задачи 13 в случае граничных условий ГУ2. Здесь же частично представлены решения, полученные сложением решений, и указан характер устойчивости отдельных ветвей. 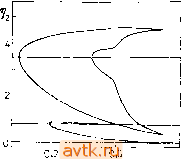 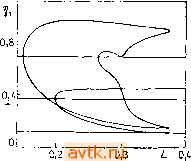 L 0,4 Рис. 6.5. Диаграмма решений для задачи 12 при ГУ2, а = 12, р = 1,5, у = = 3, 6=1, Vo = 0,01, Ох = 0,008, Оу = 0,004; r\i = x{0), tja = (/(0). Тривиальные решения в системе без пространственных градиентов (Од = = £>У = 0):
Покажем теперь, как изменится схема алгоритма в случае задачи 14. Будем искать зависимость решения уравнений (6.1.35а,Ь) с граничными условиями (6.1.36а,Ь) от параметра Da. Выберем два недостающих начальных условия в форме (6.1.37) и положим в точке 2 = 0 f,(Tj, Da) = Pe i/(0)-r/(0) = 0, F, (т1. Da) = Ренв (0) - в' (0) = 0. Вариационные уравнения для переменных Ру\=ду/дх\х, pyi = = ду/дц2, pyD!L=dy/dDa, pei=de/dr\u рв2 = дв/дг\2, Peca = = (?0/(?Da читатель может легко получить дифференцированием уравнений (6.1.35а, Ь) по rji, TI2 и Da. Начальные условия 20 М.. Холодннок и др.  0,3 0,4 0,5 L 0,6 Рис. 6.6. Диаграмма решений для задачи 12 при ГУ]. х = 0,7006, у = 3,5106;, т)1 = х'{0), 1)2 = у'(0)- Остальные параметры указаны на рис. 6.5; s -устойчивые, п - неустойчивые решения. ДЛЯ НИХ выбираются нулевыми, кроме условий pyi(l)=l, Рв2(1)=1. При этом матрица Якоби системы (6.2.41) будет иметь вид РемР (0)-р;,(0), РеРуЛ0)-Ру2{0\ Р^,лРуиЛ^) - РувЛ) .РенРв1(0)-Рж(0). РенРе2(0)-р;2(0). Р^нРвиЛ^)-РепАО) / (6.2.42) Диаграмма стационарных решений, полученная этим методом'\ приведена на рис. 6.8. При Da = О начальную точку зависимости можно найти аналитически. Сравните число решений для различных значений параметра Da, приведенных в табл. 6.4 и 6.5. 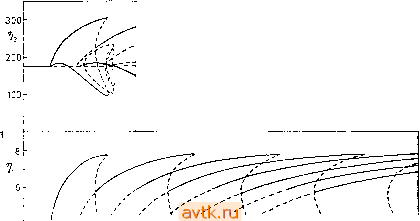 2г Рис. 6.7. Диаграмма решений для задачи 13 при ГУ2; ц = 0,0035, v = 6-10-<, с = 0,05, с' = 0,025, р = р' = 3,2, = 0,01, Оу = О = л:(0), т)2=1/(0); сплошные линии - устойчивые, прерывистые чивые решения. = 0,0045, 45, т)! = - неустой- В заключение этого пункта проиллюстрируем, как найти зависимость решения от параметра в случае задачи 15. Здесь годится подход, вполне аналогичный тому, который использовался нами в задаче 14 (в чем, впрочем, мы могли убедиться еще в предыдущем параграфе).Итак, будем искать зависимость решения уравнений (Р15-6), (Р15-7) совместно с нелинейными (алгебраическими) уравнениями (Р15-8), (Р15-9) от параметра Da. Граничные условия вновь имеют форму (6.1.36а,Ь). Два яедостающих начальных условия в точке 2=1 выбираем в > То есть применением алгоритма DERPAR к нахождению кривой -fi(T)i, т)2, Da) = Рг(ц1, г\2. Da) = О. - Прим. ред. 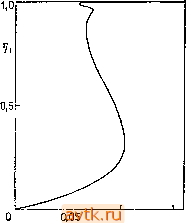
0,10 Da 0.15 0,05 0,10 Da 0,15 Рис. 6.8. Диаграмма решений для задачи 14. Рем = 10, Рен = 5, В = 15, Р = 2, вс = 0, Y = 20, Т1, = j,(l), т1г=в(1).  Рис. 6.9. Диаграмма решений задачи 15. Зависимость температуры иа выходе 12 = в(1) от параметра Da. Рем = 20, Рен =10, 6=1, В = 10, у = 20, в, = О, /м = /и = 25. соответствии с формулами (6.1.37), а в точке 2 = О имеем два нелинейных уравнения вида (6.2.41). Вариационное уравнение для Ру1 имеет вид (6.1.40). Вариационные уравнения для остальных переменных (6.1.39), а также для переменных pyDa = dy/dDa., реоа =dQ/dDa. выводятся аналогично. При этом матрица системы (6.2.41) имеет вид (6.2.42). Напомним, что на каждом шаге иитегрироваиия уравнений (Р15-6), (Р15-7), а также соответствующих вариационных уравнений иам необходимо вычислять значения переменных (6.1.41) т. е. переменных дса/ду, dca/dQ, dQ/dy, dQ/d&. Эти значения мы находим по формулам (6.1.43) так же, как это делалось в § 6.1. На рис. 6.9 приведена диаграмма решений рассматриваемой задачи в зависимости от параметра Da. Как видио из рисунка в узком интервале значений параметра данная задача имеет 5 решений. Для указанных значений параметров уравнение (Р15-11) имело только одно решение о в промежутке [y{z), 1] при любом [О, 1]. Построение диаграммы решений несколько осложняется в тех случаях, когда уравнение (Р15-11) имеет несколько корней. Подробный анализ задачи 15 читатель может иайти в сборнике [6.16]. 6.2.4. Метод отображения параметра В некоторых случаях оказывается возможным достаточно, быстро построить диаграмму стационарных решений, если к выбранному значению некоторого начального условия с помощьк> интегрирования задачи Коши мы добавим соответствующее значение параметра. Аналогичный подход был описай для сосредоточенных систем в п. 5.2.1. Так же, как и там, возможность применения этого подхода зависит от конкретного вида дифференциальных уравнений и граничных условий, а также or того, как входит в уравнения выбранный параметр. Поэтому мы продемонстрируем применение указанного метода иа двух конкретных задачах из гл. 4. Более общие соображения читатель может иайти в книгах [6.8, 6.9] и в приведенной в них библиографии. Будем строить зависимость решения задачи 16 от параметра Ф. Для стационарного случая мы свели эту задачу к одному дифференциальному уравнению второго порядка (6.1.21) с граничными условиями (6.1.16а,с). Введем новую независимую переменную 2 = Фг. (6.2.43> Тогда дифференциальное уравнение (6.1.21) приведется к виду т. е. не будет содержать Ф. Граничные условия приобретут вид 2 = 0:-g- = 0, (6.2.45а) 2 = Ф: у=\. (6.2.45Ь) Выберем теперь недостающее начальное условие в виде г/ (0) = л, О < л < 1 (6.2.46) л проинтегрируем полученную задачу Коши (6.2.44), (6.2.45а), (6.2.46) от 2 = О до точки 2 = 2i, в которой i/(zi) = l. (6.2.47) Значение Z\ определяет значение параметра Ф, соответствующее выбранному начальному условию л (и найденному решению 2i = Ф. (6.2.48) Для выполнения равенства (6.2.47) можно воспользоваться каким-либо методом последовательных приближений, например методом деления промежутка пополам. Процесс можно, например, реализовать так. Когда в процессе интегрирования становится у{г)> 1, мы возвращаемся на один шаг назад и продолжаем интегрирование с более коротким шагом (например, уменьшенным вдвое). По достижении достаточно короткого шага процесс прекращается. Опишем коротко неитерационный способ нахождения величины 21. Проинтегрируем уравнение (6.2.44), переписав его в виде системы двух дифференциальных уравнений первого порядка, dy dw а . yP(1-v) if п ап\ = j/expYp(i-%) (6.2.49) с начальными условиями (6.2.45а), (6.2.46), т. е. с условиями г/(0) = л, ш(0) = 0. В некоторой точке 2 > О, где y{z) = y<l и dy/dz = g, мы переходим к интегрированию дифференциальных уравнений вида dw а , У уР(1 - у) dz I /с о спч dy - Т + Р 1 + (1-у) Ч^- (6.2.50) 1 ... 27 28 29 30 31 32 33 ... 36 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2004-2026 AVTK.RU. Поддержка сайта: +7 495 7950139 в тональном режиме 271761
Копирование материалов разрешено при условии активной ссылки. |
 Экструзия композитов
Экструзия композитов Угловые шкафы
Угловые шкафы Искусственная кожа
Искусственная кожа Детская кроватка
Детская кроватка Мебель для ванной
Мебель для ванной Выбираем мебель
Выбираем мебель Ткань для мебели
Ткань для мебели Подъемная кровать
Подъемная кровать Шторы для дома
Шторы для дома Поролон
Поролон