

|
|
|
Разделы
Публикации
Популярные
Новые
|
Главная » Квазистационарное поведение динамических моделей 1 ... 25 26 27 28 29 30 31 ... 36 > Более точно: дифференцированием тождеств, возникающих при подстановке решения x{z,r\), y{z,r\) в уравнения (6.1.1), (6.1.2). - Прим. ред. ных в § 5.7. (Эти методы предназначались для решения систем дифференциальных уравнений первого порядка. Уравнения (6.1.1), (6.1.2) легко преобразуются в систему четырех уравнений первого порядка: = и, и' = -Lf{x, у)/D, у'= v, v= -Lg(x,y)/Dy. Начальные условия (6.1.4а) и (6.1.24) преобразуются к виду м(0) = и(0) == О, x(0) = tii, j/(0) = ti2. Мы будем, далее придерживаться исходных обозначений). По окончании интегрирования, т. е. в точке z = 1, мы получаем значения решения, зависящие от выбора условий (6.1.24): х{1,1\), х'{1,1[\), у{1,г\), j/(l,Ti). Для того чтобы найденное решение задачи Коши было одновременно и решением исходной краевой задачи, нам необходимо удовлетворить условиям (6.1.4Ь), т. е. Л(т1) = л;(1, Т1) = 0, 2(л) = г/(1, Т1) = 0. (6.1.25) Соотношения (6.1.25) представляют собой два нелинейных уравнения относительно неизвестных и Ц2, которое можно решить, используя любой из методов решения нелинейных уравнений, например, метод Ньютона (см. § 5.1). Для вычисления элементов матрицы Якоби, т. е. производных dFi/df\i, можно воспользоваться соответствующими разностными заменами, вычислив функции Fi и / г в точках (tii,ti2), (tii + Atj, т]2), (Ль Tl2 + Ал)- Каждое такое вычисление требует решения задачи Коши (6.1.1), (6.1.2), (6.1.4а), (6.1.24) при соответствующем задании начальных условий. Погрешности, возникающие в процессе интегрирования, могут при этом перекрываться погрешностями аппроксимации использованных разностных формул, и элементы матрицы Якоби могут вычисляться весьма неточно. Поэтому часто, когда это возможно, используются вариационные дифференциальные уравнения (уравнения в вариациях) относительно переменных pi = dx/dni, Pyl = dy/dr\i, i = 1, 2. (6.1.26) Вариационные уравнения получаются посредством дифференцирования исходных уравнений') (6.1.1), (6.1.2) по tii и и перестановки дифференцирования по z и т];: p:,+T:iwp+i-p.,)-0 =-2. Начальные условия для варьируемых переменных получаются в результате дифференцирования исходных начальных условий (6.1.4а), (6.1.24) по тц и 112 Р.1 (0) = 1, Р.2 (0) = О, р,1 (0) = О, р,2 (0) = 1, Если проинтегрировать дифференциальное уравнение (6.1.27) вместе с уравнениями (6.1.1) и (6.1.2) и начальными условиями (6.1.4а), (6.1.24), (6.1.28), что в точке z = 1 мы получим = Р'хЛ) =РхЛ1), (6.1.29) ж^ру 4S=2(i). Тем самым, мы имеем матрицу Якоби для применения метода Ньютона, вычисленную на основе интегрирования вариационных уравнений. Заметим, что в данном случае для одной итерации метода Ньютона нам приходится интегрировать систему 12 дифференциальных уравнений первого порядка. При аппроксимации элементов матрицы Якоби соответствующими разностными формулами нужно трижды интегрировать систему 4-х дифференциальных уравнений первого порядка. При этом объем вычислений для большой группы различных функций f У1 g оказывается приблизительно одинаковым. Иногда, правда, удается существенно сократить затраты машинного времени при переходе к вариационным уравнениям, например, при появлении функций ехр, sin, cos, дифференцирование которых дает те же функции. В случае ГУ1 дополнительные начальные условия к (6.1.3а) выбираются следующим образом: х'{0) = ци г/(0) = Л2. (6.1.30) При этом условия, которым нужно удовлетворить после интегрирования от Z = О до Z = 1, имеют вид (см. (6.1.3b) Fi{n) = x{\)-x = 0, F2i4) = у il)-у = 0. (6.1.31) Вариационные уравнения (6.1.27) остаются теми же самыми, а начальные условия для варьируемых переменных заменяются на условия P.iiO)-PyiiO) = 0, i=l, 2, р;,(о)=1, р;,(о)=о, р;,(о)==о, p;,(o)=i. -- Для ГУЗ в форме (6.1.5) с ненулевыми коэффициентами (с тем чтобы в точке z = 0 эти условия не совпали в ГУ1 или ГУ2) дополнительные начальные условия в этой точке можно выбрать в виде (6.1.24) или (6.1.30). В случае выбора условий (6.1.24) из (6.1.5а) следует х'Щ = (У;со - РхоЛОКо, у' (0) = (Yvo - Рг,оЛ2)/%о- (6-1 -33) При этом вариационные дифференциальные уравнения остаются теми же, а начальные условия заменяются следующими: Р..(0)=1, Р.2(0) = 0, р^,КО) = 0, р,2(0)=1. P;i(0) = -M/ .o, р;2(0)==0, р;,(0) = 0, р;2(0)=-р,о)/%о- (6.1.34) Конкретный вид функций Fi и производных OFi/dt]/ читатель может легко получить с помощью формул (6.1.5Ь). Конечно, мы могли выбирать недостающие начальные условия в точке z= 1 взамен точки z = 0 и находить решения соответствующих задач Коши на промежутке от z=l до z = 0. В некоторых задачах выбор направления интегрирования может играть существенную роль, поскольку иногда численное интегрирование в одном из направлений оказывается труднореализуемым (соответствующая задача Коши неустойчива по отношению к начальным условиям). Это имеет место, например, в задачах 14 и 15 при больших значениях критерия Пекле, а также в задаче 16. Если задача Коши неустойчива в обоих направлениях, метод стрельбы применять нельзя и следует использовать, например, разностные методы решения, описанные в подпункте 6.1.1. Рассмотрим теперь примеры расчетов методом стрельбы, иллюстрирующие процесс построения стационарных решений некоторых задач из гл. 4. В качестве первой из этих задач исследуем задачу 11, т. е. систему типа реакция-диффузия (6.1.1), (6.1.2), функции fag для которой имеют вид (Р11-1). В табл. 6.2 приведены некоторые результаты для ГУ2 при выборе начальных условий типа (6.1.24). Отметим, что второе из представленных в таблице решений однородно по пространству. Первое и третье рещения зависят от z и получаются друг из друга симметрией: хЦг) = х^Н1-г), t/i(2) = y 41 -z). В табл. 6.3 представлены соответствующие результаты для ГУ1, при выборе начальных условий типа (6.1.30). Здесь третье решение пространственно однородно: х{г) = 2; y(z) = 2, 3. В обеих этих ситуациях применялся метод Ньютона, причем матрица Якоби подсчитывалась с помощью соответствующих уравнений в вариациях. Таблица 6.2. Метод стрельбы для задачи 11 в случае ГУ2 (Л = 2, В = 4,6, Dx =0,0016, Dy = 0,008, L = 0,12).
Таблица 6.3. Метод стрельбы для задачи 11 в случае ГУ1 (Л = 2; В = 4,6; Dx = 0,0016; Dy = 0,008; L = 0,12; л:(0) = х = 2; у(0) = у = 2,3).
Используем теперь метод стрельбы для нахождения стационарных решений задачи 14, т. е. для решения уравнений 1 г/ -г/ + Ва(1-г/)ехр- = 0, (6.1.35а) 1 в - в' + В Da (1 - г/) ехр - р (в - в,) = О, (6.1.35b) соответствующих уравнениям (Р14-7), (Р14-8). Граничные условия при этом имеют вид (Р14-9), (Р14-10), т. е. Ремг/(0)-г/(0) = 0, Рбнв (0) - в'(0) = О, (6.1.36а) г/(1) = 0, -в'(1) = 0. (6.1.36Ь) Выберем два недостающих начальных условия в точке 2=1: г/(1) = Ль в(1) = Л2. (6.1.37) Тогда после интегрирования уравнений (6.1.35) с начальными условиями (6.1.36Ь) и (6.1.37) на промежутке от 2=1 до 2 = 0 мы имеем , (П) - РеУ (0) - у' (0) = О, F, (п) = Ренв (0) - в' (0) = 0. (6.1.38) Результаты решения уравнений (6.1.38) методом Ньютона с использованием соответствующих вариационных уравнений приведены в табл. 6.4. В ней представлен случай, когда существует пять решений данной задачи. Отметим, что область сходимости метода Ньютона для некоторых решений мала. В частности, так обстоит дело для пятого решения. Сходимость к этому решению даже из близкого к нему начального приближения может быть медленной (см. вторую половину таблицы). Наконец, в табл. 6.5 приведены окончательные решения задачи для нескольких различных значений числа Дамкёлера. Замечание. Во многих задачах концы интервала равноправны и можно использовать метод стрельбы в любом направлении- как справа налево , так и слева направо . В этой задаче есть выделенное направление: решение задачи Коши от 2 = 0 к 2=1 при больших числах Пекле сильно неустойчиво, и такая реализация метода стрельбы здесь не годится. В качестве последнего примера использования метода стрельбы рассмотрим задачу 15, в которой наряду с дифференциальными уравнениями появляются и иные соотношения (нелинейные алгебраические уравнения). Будем искать решение y{z), 0(2) дифференциальных уравнений (Р15-6) и (Р15-7) страничными условиями вида (6.1.36). Таблица 6.4. Метод стрельбы для задачи 14, Рен = 5, Рем =10, у = 20, В = 15, р = 2, вс = О, Da = 0,07.
Таблица 6.5. Метод стрельбы для задачи 14 (Рен = 5, Рем =10, у = В = 15, р = 2, вс = 0). Решения для последовательных значений Da
При этом в уравнения входят также неизвестные функции (o{z) и 0(2), которые должны удовлетворять соотношениям (Р15-8) и (Р15-9). Для практических вычислений вместо этих нелинейных (алгебраических) соотношений более удобно использовать формулы (Р15-10) и (Р15-11). При фиксированных значениях параметров /м, н, Da, В, у и заданных значениях функций y{z) и 6(2) уравнение (Р15-11) представляет собой при каждом z нелинейное уравнение относительно неизвестной а(2). Решая уравнение (Р15-11), мы находим значения а(2), после чего подставляя их в формулу (Р15-10), вычисляем значения функции 9(2). Используем для решения этой задачи метод стрельбы. Два недостающих начальных условия опять выберем в точке 2=1 в форме (6.1.37). Затем проинтегрируем уравнения (Р15-6), (Р15-7) с начальными условиями (6.1.36b) и (6.1.37) на промежутке от 2 = 1 до 2 = 0. На каждом шаге интегрирования нам необходимо вычислять правые части дифференциальных уравнений, в которые наряду с параметрами и значениями функций г/ и 6, входят также значения функций а] и 9. Эти значения определяются из формул (Р15-11) и (Р15-10). После проведенного таким образом интегрирования, когда на каждом шаге решается одно нелинейное уравнение, мы получаем в точке 2 = 0 систему двух уравнений (6.1.38) относительно двух неизвестных т)! и т)2. Эта система может быть решена методом Ньютона с использованием вариационных уравнений для переменных Pyi = ду/дц р^ = де/дц /=1,2. (6.1.39) Первое из этих уравнений имеет вид Из этого примера видно, что наряду с вариационными переменными, определяемыми формулами (6.1.39), у нас возникают еще и другие переменные дсй да dQ dQ /с 1 л 1 \ -df Ж' -щ-- (б--) Значения этих переменных на каждом шаге интегрирования вычисляются из соотношений (Р15-8), (Р15-9), определяющих а = а (г/, 6) и 9 = 9 (г/, 6). Запишем их в виде е,(г/, в, а, е) = 0, / = 1,2. (6.1.42) Предположим, что функции Gi удовлетворяют условиям теоремы о неявных функциях, и пусть значения а (г/, 6) и 9 (г/, в) для заданных и в найдены. Тогда производные (6.1.41) можно найти, решая две системы линейных алгебраических уравнений
(6.1.43а) (6.1.43Ь) где dGi/dy = -Jf, dG2/dy = 0, dGi/двО, dGz/dS =-Jn, a матрица Г определяется как r-\dGi dGi -, да dGj L да dQ dGi 59 -I (6.1.44) Описанный подход несложно реализовать в случае, когда нелинейное уравнение (р15-11) имеет одно и только одно решениеа, которое должно удовлетворять естественному с физической точки зрения требованию у < й < 1 (см. формулу (р15-5)). Значительные сложности возникают тогда, когда уравнение (р15-11) при определенной комбинации параметров и переменных у и в будет иметь несколько допустимых решений (как правило, три различных решения а). Такая ситуация имеет место, в частности, при больших значениях параметра В. В этом случае метод Ньютона, используемый для решения уравнения (р15-11), может оказаться расходящимся или же будет сходиться к какому-либо другому решению, а не к тому, которое ожидалось. В зависимости от того, какой из корней уравнения (р15-11) выбрать, получаются различные функции y{z) и в(2). Из физических соображений (в случае трех решений) интерес представляют прежде всего два крайних решения а уравнения (р15-11), а именно значение а, лежащее в окрестности значения у, (л~>у (так называемое нижнее решение), и корень, располагающийся в окрестности 1, а <; 1 (так называемое верхнее решение). При решении дифференциальных уравнений (р15-6), (р15-7) мы поступаем следующим образом: в областях параметров, где существует несколько решений уравнения (р15-11), мы всегда рассматриваем (если это возможно) только нижнее решение а (или соответственно верхнее решение а) и Обычно связанных с устойчивостью найденных распределений концентраций и температуры. - Прим. ред. тем самым получаем два различных (основных) решения дифференциальных уравнений. Если же комбинировать на разных подынтервалах 2е[0, 1] верхнее и нижнее решения а, то мы получим разрывные профили а (г), 9(2). На рис. 6.1а приведены профили 0(2), у (г), а (г), 9(2), найденные для случая, когда при всех z выбиралось нижнее решение а уравнения (Р15-11). На рис. 6.1Ь представлен пример профилей решений (для тех же значений параметров), когда 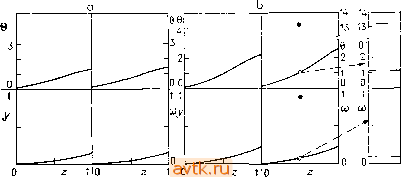 1 0,4Э9 0,5015 Рис. 6.1. Аксиальные профили конверсии и температуры, задача 15; Da = = 0,065, Рвы = 20, Ре = 10, Р = 1, В = 15, у = 20, в. = О, 1м == /я = 25; а) непрерывные профили ш и в, Ь) разрывные профили шив. а (г) и 9(2) не являются непрерывными функциями (на промежутке 2 е [0,4995; 0,5015] мы рассматривали верхнее решение а). Из сравнения рисунков видно, что профили решений y{z) и 0(z) изменились. 6.1.3. Метод многократной стрельбы Метод стрельбы, описанный в предыдущем пункте, иногда не позволяет получить удовлетворительные результаты. Так, решение соответствующих задач Коши (включая дифференциальные уравнения в вариациях) может оказаться практически невозможным при наличии сильной чувствительности к начальным условиям. В таких случаях часто оказывается удобным использовать метод многократной стрельбы (см., например, [6.34]). Опишем кратко идею этого метода на примере задачи (6.1.1), (6.1.2) с граничными условиями ГУ2 вида (6.1.4). По аналогии с п. 6.1.1 выберем на промежутке ze[0, 1] сетку узловых точек 2о = 0, 21, 2 =1, 2,+i > 2,-, которая, вообщс говоря, может не быть эквидистантной. В практических задачах эта сетка узловых точек выбирается гораздо менее плотной, чем при использовании метода конечных разностей. На каждом подынтервале [г,-, 2,-+i], t = 0, п-1 уравнения (6.1.1), (6.1.2) интегрируются независимо. Для этого нам необходимо задать начальные условия в точках 2 t = О, ... п-1; эти начальные значения мы обозначим как tj,-. В точке 2о = О уже заданы два условия (6.1.4а), и поэтому здесь, аналогично тому, как это делалось в п. 6.1.2, мы выбираем два дополнительных условия вида (6.1.24). При этом вектор т)о будет иметь только две составляющих tioi =л;(0) и irio2 = = у(0). Остальные векторы т),-, i=\, п-1 будут иметь по четыре составляющих Т = (X (2,), Х' (2,), у (2,-), у' (2,)). (6.1.45) Обозначим решение соответствующей задачи Коши на каждом подынтервале [2г, 2,+i] через x{z) = x{z; г^щ) (и аналогично для x{z), у (г), у'(г)). Метод многократной стрельбы состоит в следующем: так подобрать векторы ti t = 0, ... n-1, чтобы функции x{z), x{z), y{z), y{z), полученные частями на отдельных подынтервалах [2 Zt+i], оказались непрерывными и чтобы при этом были удовлетворены граничные условия (6.1.4Ь). Для этого в точках 2(, t = 1, ..., п - 1, должны выполняться условия {xizr, 2, 1, ii,- i). x(Zi; Zi i, iii i), у(гг, 2, i, TJi-i), , w (6.1.46) a в точке Zn=\ (в соответствии с условиями (6.1.4b)) должны быть выполнены соотношения (1; n -i) = 0, /(1; 2 ь n -i) = 0. (6.1.47) Уравнения (6.1.46) и (6.1.47) представляют собой систему из 4(га-1) + 2 нелинейных уравнений относительно 4(га-1)-}-2 неизвестных - составляющих векторов tjo,Чь ....iin-i. Эти уравнения можно решать с помощью любого подходящего метода (например, с помощью метода Ньютона). Для вычисления матрицы Якоби можно опять использовать вариационные дифференциальные уравнения (см. п. 6.1.2). Указанный алгоритм легко модифицируется на случай ГУ1 и ГУЗ; при этом в случае ГУЗ мы выбираем две неизвестных, например х{0), y(0), а затем из уравнений (6.1.5а) находим остальные неизвестные, т. е. л;(0), у'{0). Далее, с помощью условий (6.1.5Ь) мы легко получаем соотношения, аналогичные (6.1.47). 1 ... 25 26 27 28 29 30 31 ... 36 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2004-2026 AVTK.RU. Поддержка сайта: +7 495 7950139 в тональном режиме 271761
Копирование материалов разрешено при условии активной ссылки. |
 Экструзия композитов
Экструзия композитов Угловые шкафы
Угловые шкафы Искусственная кожа
Искусственная кожа Детская кроватка
Детская кроватка Мебель для ванной
Мебель для ванной Выбираем мебель
Выбираем мебель Ткань для мебели
Ткань для мебели Подъемная кровать
Подъемная кровать Шторы для дома
Шторы для дома Поролон
Поролон