

|
|
|
Разделы
Публикации
Популярные
Новые
|
Главная » Квазистационарное поведение динамических моделей 1 ... 10 11 12 13 14 15 16 ... 36 d -ш 7<: б<; 5<: з<; 2 о - i I- -1- 10 20 30- ;С 50 60 70 80 90 100 ПО 120 130 М К Рис. 5.1. Диаграмма успешности применения метода Ньютона в зависимости' от случайно выбранного начального приближения. К-порядковый номер-начального приближения. На вертикальной оси приведены номера полученных решений (см. табл. 5.1 при = 4). Символ d означает расходимость метода от соответствующего начального приближения. Для решений, отмеченных в табл. 5.1 звездочкой, два симметричных решения на рисунке представлены отдельно. Проиллюстрируем указанный подход на примере, приведенном в гл. 4 в качестве задачи 8 для случая = 2,3,4. В табл. 5.1 представлены решения для двух, трех и четырех связанных между собой реакторов (т. е. для п = 4, 6, 8 в системе (5.1.3)). Число решений при этом оказывается соответственно равным 3, 7 и 15 [5.2]. В случае цепочки из большего числа реакторов количество различных стационарных решений будет еще больше. Начальные приближения х° для метода Ньютона выбирались случайным образом из интервалов хОе(0, 10), г = 1, 2, .. ., п. (5.1.8) Примеры расчета итераций приведены в табл. 5.2. На рис. 5.1 изображена диаграмма успешности этого подхода для случая четырех связанных между собой реакторов {N = 4). выбранного начального приближения мы практически получаем один из следующих результатов: 1. итерационный процесс сходится к физически приемлемому решению (новому или уже найденному ранее); 2. итерационный процесс сходится к физически неприемлемому решению; 3. итерационный процесс расходится, т. е. значения переменных с какого-то момента в ходе итераций превышают установленные пределы; 4. итерационный процесс не сходится с предписанной точностью при числе итераций, не превосходящем заданного. Таблица 5.1. Стационарные решения в случае модели линейного каскада связанных друг с другом реакторов {задача 8: Л = 2, S = 6, Di = 0,4, Dz = 4). В первой строке каждой ячейки указана величина концентрации X, во второй - величина коицентраЩ1и Y.
Каждое решение, отмеченное звездочкой, задает по существу два решения. Второе решение, симметричное к указанному в таблице, например для N=4, мы получаем, меняя местами значения концеитраци* в первом н в четвертом, а также во втором н в третьем реакторах. Таблица 5.2. Поведение итераций в процессе вычисления стационарных решений методом Ньютона (задача 8: = 4, Л = 2, S = 6, Z), = 0,4, Ог = 4).
Область сходимости, т. е. область подходящих начальных приближений, в некоторых случаях может оказаться очень мала. Иногда в подобной ситуации используется метод продолжения решения из области (характеризуемой определенным значением выбранного параметра), в которой решение отыскать сравнительно легко, в область, где нахождение решения представляет определенные трудности. Параметр, по которому мы продолжаем решение, может быть реальным (физическим) параметром задачи, либо может искусственно вводиться в постановку задачи. (Иногда мы говорим о погружении исходной задачи в класс задач, зависящих от параметра.) Первый из этих подходов будет рассмотрен в § 5.2, а второй, так называемый метод введения искусственного параметра, кратко описывается ниже. Запишем систему (5.1.3) в векторной форме f(x) = 0; (5.1.9) при этом значение параметра а мы считаем фиксированным и поэтому в уравнениях его не указываем. Идея метода введения искусственного параметра заключается в построении функции Н(т, х), зависящей от некоторого вещественного параметра х, причем обычно те [0,1]. Функция Н выбирается таким образом, чтобы решение уравнения Н(0, х) = 0 (5.1.10) можно было построить по возможности просто, например, не прибегая к процессу итераций (это решение мы обозначим через Хо). Далее, уравнение Н(1, х) = 0 (5.1.11) ДОЛЖНО иметь те же корни, что и уравнение (5.1.9), например Н(1, x) = f(x). (5.1.12> Если существует непрерывная зависимость х(т), описывающая решение уравнения Н(т, х(т)) = 0, те [0,1], (5.1.13) с условием х(0) = хо, то х(1) является решением исходного уравнения (5.1.9). В принципе мы можем протянуть решение X от т = 0 (когда х = Хо) до т = 1 двумя способами. Первый из НИХ заключается в последовательном использовании какого-нибудь итерационного метода (например, метода Ньютона) в узлах сетки то = О, ti, тг, Тт = 1. В качестве начального приближения процесса итераций для т = т/ можно выбрать решение x(t/ i). Второй способ основан на дифференцировании тождества (5.1.13) по т, т. е. зависимость х(т) ищется как решение системы дифференциальных уравнений - = -[Н;(г. х)]-н;(г, X) (5.1.14) с начальным условием х(0) = Хо. Укажем две возможности выбрать функцию Н: Н(т, x) = f(x)-b(T-l)f(xo) (5.1.15) Н(т, x) = (l-T)(x-Xo)-bTf(x). (5.1.16) Представление (5.1.15) тесно связано с методом Ньютона. (Чтобы убедиться в этом, нужно, взяв Н в виде (5.1.15), решить дифференциальное уравнение (5.1.14) методом Эйлера с шагом h=l.) Более подробный анализ различных вариантов метода введения искусственного параметра читатель может найти в. книгах [5.1, 5.3]. Описание некоторых других подходов и их связь с итерационными методами рассмотрены в работе [5.4]. 5.2. ЗАВИСИМОСТЬ СТАЦИОНАРНЫХ РЕШЕНИИ ОТ ПАРАМЕТРА-ДИАГРАММА РЕШЕНИЙ В предыдущем параграфе было показано, как находить стационарные решения системы (5.1.1) при фиксированных значениях параметров. Если мы хотим изучить поведение динамической модели в целом, то обычно оказывается недостаточно знать ее характеристики только при одном конкретном значении того или иного параметра -нужно иметь представление о характере поведения модели в зависимости от значений параметров, изменяющихся в некотором диапазоне. В ЭТОМ параграфе мы займемся построением зависимости стационарных решений от одного (скалярного) параметра а, входящего в систему (5.1.3). Найденные зависимости, представленные в виде соответствующих графиков, мы будем называть диаграммой решений (см. гл. 3, § 3.1). Простейший метод построения диаграммы заключается в последовательном использовании итерационной процедуры, описанной в § 5.1. Так, например, выберем в интервале изменения значений параметра а узловые точки а <; а'< ... <; а* и применим последовательно метод Ньютона для указанных значений а. В качестве начального приближения для нашего итерационного процесса при а = а' мы будем выбирать решение х, найденное при а = а'~, т. е. х(а'-). Если сетка значений параметра а достаточно густа и на полученных зависимостях отсутствуют точки бифуркации, то для обеспечения сходимости метода Ньютона при каждом значении а оказывается достаточным од-ной-двух итераций. Указанная методика не позволяет, однако, переходить через точки поворота на диаграм.ме решений (см. § 3.1), а в окрестности точек ветвления процесс может даже расходиться. Поскольку метод последовательных шагов не является универсальным, были развиты методики, с помощью которых построение зависимости решения от параметра в целом происходит более или менее автоматически. Основные принципы этих методик будут рассмотрены в последующих пунктах. 5.2.1. Отображение параметра Во многих случаях оказывается возможным использовать некоторые специальные свойства системы (5.1.3), которые позволяют разработать тот или иной неитерационный алгоритм (или же, при необходимости, итерационный, но в пространстве существенно меньшей размерности). Рассмотрим, например,случай, когда система (5.1.3) нелинейна лишь по одной переменной Xk и линейна по всем другим переменным, а также по параметру а. Тогда для построения диаграммы решений мы можем использовать следующий подход. Выберем последовательность значений переменной Xk (достаточно близких друг к другу). Для каждого выбранного значения переменной Xk решим систему линейных алгебраических уравнений (5.1.3) относительно неизвестных лгь лгг, х^-и Xk+u , Хп,а (например, методом исключения Гаусса) - в результате мы получим одну из точек диаграммы решений. Существуют и другие возможности отображения параметра, когда, например, мы пользуемся тем, что умеем решать квадратное уравнение, можем построить соответствующую обратную функцию и т. д. Используемый при этом Напомним, что Da - обозначение одного параметра (числа Дамкёлера), а не произведение D-a. - Прим. ред. ПОДХОД всегда зависит от конкретного вида уравнений, и мы продемонстрируем указанную методику на нескольких примерах. Рассмотрим задачу 1 (см. гл. 4, п. 4.2.1). Стационарное состояние в данном случае описывается уравнениями -Ax-bDa(l-x)exp(jq) = 0, (5.2.1) -Ав + ВВг{1-х) ехр (iq) - Р(в - в,) = О, (5.2.2) где X и в - переменные состояния. Умножая уравнение (5.2.1) на параметр В и вычитая полученный результат из уравнения (5.2.2), после простых преобразований мы получаем соотношение = Т + (5.2.3) которое позволяет свести систему двух уравнений (5.2.1) н (5.2.2) к одному нелинейному уравнению для переменной в: -Ав-Ь Da (в - в --f) ехр (- Р (0-Ь 6,) = 0. (5.2.4) Уравнение (5.2.4) зависит от переменной в нелинейно, тогда как параметры Da В, р и вс входят в него линейным образом. Параметр Л (после умножения обеих частей уравнения на Л) входит в полученное уравнение квадратичным образом, а параметр у - нелинейно. Для нахождения зависимости решения от параметра Da (при фиксированных значениях остальных параметров) можно использовать следующую процедуру: 1. Выбираем значение в(в > вс).. 2. Из уравнения (5.2.4) подсчитываем значение параметра Da. 3. Из уравнения (5.2.3) находим значение другой переменной состояния X. Пример одного из вариантов расчета представлен в табл. 5.3. Читатель может легко построить соответствующие алгоритмы для отображения параметров В, Р и вс, а если воспользоваться решением соответствующего квадратного уравнения, то и для отображения параметра Л. Рассмотрим теперь задачу 1 в форме (Р1-6), (Р1-7), введя параметры х (время задержки в реакторе) и а по формулам Р = ах, Da = oT. Совершенно аналогично можно построить ал- Таблица 5.3. Отображение параметра Da в задаче 1 {у = 20, В Л= 1, е. = -5, Р = 0,6).) = 10,
1) Cm. п. 5.3.4 (S - седло, SU - устойчивый узел, NU - неустойчивый узел, SO - устойчивый фокус, NO - неустойчивый фокус. Я ,s - собственные числа матрицы Якоби). горитм ДЛЯ отображения параметра т. Фиксируя значение в, мы получаем для т квадратное уравнение вида - kpa (е - вс) -- / 0 Л -expl (тТвл)] + + [к, (В - в) ехр (-npes) - ° (® - 9.)] + [-Лв] - 0. (5.2.5) Диаграмма решений, построенная с помощью этого уравнения для нескольких различных значений параметра а, представлена на рис. 5.2. Читатель может легко вывести аналогичные алгоритмы для задач 5 и 6. В обоих случаях фиксируются значения концентрации субстрата Cs и подсчитывается значение некоторого параметра задачи. В задаче 6 это могут быть параметры р V/F, Ks, Ki. В случае же задачи 5 соответствующая процедура оказывается более сложной, и мы приведем лишь краткое ее описание. 0. Левые части соотношений (р5-1) -(р5-6) полагаем равными нулю. При этом для стационарных значений Cz и Ст мы получим Cz = CzO, Ст = Сто- 1. Выбираем значение Cs. 2. Из уравнений (р5-1) и (р5-2) вычисляем Сх и р. 3. Подставляя результат в зфавнение (р5-3), находим линейную зависимость рс от Сс, которую затем подставляем 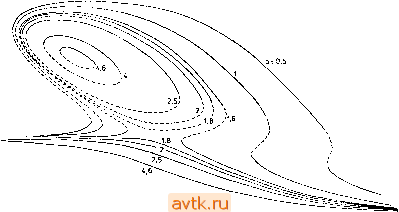 Рис. 5.2. Диаграмма стационарных решений задачи 1, у = 20, В = 10, Л=1, вс = -5, = 1; сплошные линии - устойчивые решения, штриховые - неустойчивые решения. в соотношение (р5-4). При этом мы получаем квадратное уравнение относительно Сс. Физически допустимые решения этого квадратного уравнения дают нам окончательные значения Сс, рс- 4. Из уравнения (р5-9) для р, (величину р, мы уже определили на этапе 2) можно найти теперь один из параметров р.,/Cs, Ки /Са, К\ в предположении, что остальные параметры заданы. Как уже говорилось, метод отображения параметра не обладает достаточной общностью. В связи с этим были развиты методы общего характера, которые мы рассмотрим в следующих пунктах. При этом уравнение т+-+т+т= < -> Точнее, в этих точках теряет смысл само уравнение (5.2.6). -Прим. > Дело, конечно, не в выборе параметра, а в рассмотрении х и а как равноправных переменных. Эта, почти очевидная, мысль не требует обязательного рассмотрения дифференциального уравнения (5.2.6). - Прим. ред. 5.2.2. Метод дифференцирования по параметру Пусть в точке (х°, а ) выполнены условия теоремы о неявной функции: f(x°,a°) = 0 и матрица Якоби J{x, a) = [dfi/dxj] невырожденная. Тогда для функции х{а), задаваемой уравнением f(x, а) = 0, g = -[J(x, а)Г'{х, а). (5.2.6) Соотношение (5.2.6) можно трактовать как систему дифференциальных уравнений для нахождения функции х(а) с начальным условием х(ао) = х<. (5.2.7) Если матрица J на промежутке [а°, а'] оказывается регулярной (имеющей обратную), то зависимость решения от параметра х(а), найденная путем интегрирования этой системы, будет удовлетворять соотношению f(x(a), а) = 0, аеК, а'], поскольку -£ f (X (а), а) = J (х (а), ) + (х (а), а) = 0. В критических точках диаграммы решений матрица J оказывается вырожденной, и потому указанный подход, т. е. численное интегрирование системы дифференциальных уравнений (5.2.6), отказывает в тех же точках, что и процедура последовательного применения метода Ньютона Однако этот метод можно модифицировать путем введения нового параметра. Обычно в качестве такого параметра выбирается длина дуги на кривой f(x,a) = 0 в (п-f-1)-мерном пространстве переменных Xi,X2.....л: , Обозначим ее через г; тогда, дифференцируя тождество f(x(z),a(z)) = 0 по г, находим определяет параметр z как длину дуги кривой. Начальное условие (5.2.10) теперь принимает вид 2 = 0: х = х , а = аР. (5.2.10) Соотношения (5.2.8) можно рассматривать как систему п линейных алгебраических уравнений относительно tt-f-1 неизвестных dxi/dz, dx2/dz.....dxn/dz, da/dz. Мы можем решить эту систему так, чтобы найти зависимость выбранных п неизвестных от заданной неизвестной dx/dz, где k фиксировано. В дальнейшем для упрошения записи будем обозначать (5.2.11) Для построения указанной зависимости необходимо, чтобы матрица Г dfi df, dfi df, -I J* = udx, dfn dx dfn dx n+l -I (5.2.12) которая получается из матрицы системы (5.2.8) J вычеркиванием k-ro столбца (квадратная матрица размером пУп), оказалась невырожденной. В точке поворота всегда можно выбрать индекс k так, чтобы матрица Jk была невырожденной; в точке ветвления, наоборот, все Jk вырождены. Если матрица ik - невырожденная, то систему (5.2.8) можно представить в виде dx i=\, 2, -bl, (5.2.13) где коэффициенты p, подсчитываются методом исключения Гаусса. Выбор индекса k представляет собой самостоятельную проблему. Мы либо фиксируем его заранее, либо видоизменяем алгоритм исключения Гаусса с выбором главного элемента для решения (неквадратной) системы п линейных алгебраических уравнений (5.2.12) отнооительно п-\-\ неизвестных. При этом неизвестная, в столбце которой отсутствует главный элемент, есть неизвестная Xk Подставим найденные зависимости (5.2.13) в уравнение (5.2.9): г п + 1 -,-1/2 1 + (5.2.14) i = l - JV-fe -1 > Речь идет о выборе главного элемента по строке . Прн этом переменные могут & ть предварительно масштабированы, см. [5.10]. - Лрцл. ред. 1 ... 10 11 12 13 14 15 16 ... 36 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2004-2026 AVTK.RU. Поддержка сайта: +7 495 7950139 в тональном режиме 271761
Копирование материалов разрешено при условии активной ссылки. |
 Экструзия композитов
Экструзия композитов Угловые шкафы
Угловые шкафы Искусственная кожа
Искусственная кожа Детская кроватка
Детская кроватка Мебель для ванной
Мебель для ванной Выбираем мебель
Выбираем мебель Ткань для мебели
Ткань для мебели Подъемная кровать
Подъемная кровать Шторы для дома
Шторы для дома Поролон
Поролон